1. ábra * Miért nem képes a vezető a stabilitás határán mozgó járművet irányítani?
Bevezetés
A közlekedés volumenére és összetételére vonatkozó európai előrejelzések mindegyike - kis eltérésekkel - azt mutatja, hogy az elkövetkező évtizedben jelentős növekedés várható. A közúti közlekedés volumene egyes becslések szerint 55-95 %-os mértékben növekedhet, aminek kezelése a jelenlegi közlekedési infrastruktúra állapota mellett egyre nehezebb. További problémát jelent ennek a növekedésnek az összetétele, hiszen jelentős mértékben növekszik az áruszállítás volumene, amelyben továbbra is a teherjárművek játsszák a legnagyobb szerepet. Ennek indoka a termelés struktúrájának változásában keresendő: mind a gyártó, mind a beszállító arra törekszik, hogy az adott áru minél rövidebb ideig legyen az ő kezelésében, csökkentve ezzel a gyártás költségeit és természetesen a saját rizikóját. S bár emelkedik a kombinált szállítás jelentősége, rugalmassága miatt továbbra is a közúton történő célba juttatás marad a legjelentősebb.
Az 1. táblázat összefoglalja és értékeli azokat a lehetőségeket, amelyek potenciális alternatívát jelentenek e helyzet kezelésére. Nyilvánvalóan a közúton szállított anyagmennyiség csökkentése lenne a legkézenfekvőbb, hiszen egy vasúti mozdony motorjának a környezetre gyakorolt hatása nem több mint 3-4 teherautóé, azonban több százszoros mennyiséget képes elszállítani. Problémát a vasúti szállítás flexibilitása okoz. Természetesen fel lehetne gyorsítani a közúti infrastruktúra fejlesztését is, aminek egy sor pozitív hatása van (munkahelyteremtés, gazdaság növekedése), azonban ezt jelentős részben az államok finanszírozzák, emiatt lassú, valamint társadalmi tiltakozással jár (például Németország nyugati felében újabb autópályák építése gyakorlatilag lehetetlen). Ami lényegesen ígéretesebbnek tűnik, az nem az út jellegű infrastruktúra, hanem az irányító rendszer fejlesztése, ami azonnali hatással járhat. Ide tartoznak például a navigációs rendszerek, amelyek lehetővé teszik a jármű tervezett útvonalának dinamikus módosítását. Természetesen ezek a megoldások csak bizonyos mértékben tudják kezelni a problémát, de másokkal együtt jelentős hatással bírhatnak. A járművek sebességének növelése, illetve a követési távolság csökkentése is megoldást jelent, hiszen így nő a közlekedési sűrűség, azonban vele párhuzamosan nő a balesetek bekövetkezési valószínűsége is. Hasonló módon a járművek terhelhetősége és méreteinek növelése is megoldást jelent, azonban ez problémákkal jár: növekszik az útterhelés, módosítani kell az infrastruktúrát. Az intelligens járműrendszerek ezekben az esetekben kínálhatnak megoldást, azaz bizonyos mértékben növelhető a közlekedési sűrűség úgy, hogy a közlekedési balesetek száma és az infrastruktúra terhelése nem feltétlenül növekszik.
A menetdinamikai szabályozó rendszerek alkalmazásának szükségessége
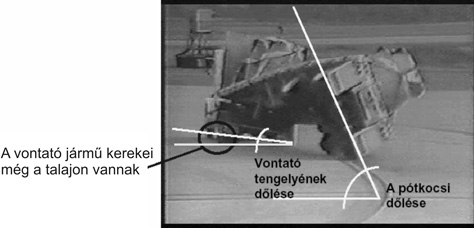
Mi okozza a problémát, miért nem képes a jármű vezetője az említett helyzetek kezelésére? Az 1. ábra jól szemlélteti ezt a helyzetet: a szerelvény pótkocsija közel van a felboruláshoz, míg a jármű vezetője ebből közvetlenül nem sokat érzékel. Bár ez egy kifejezetten valós helyzet, és a haszonjármű-balesetek jelentős részét éppen a felborulásos esetek teszik ki, hasonló módon képtelen a személyautó vezetője a kicsúszás vagy megpördülés határán lévő járműben érzékelni az adott helyzetet, mivel a jármű dinamikájáról nincs közvetlen információja. Az autóversenyzők a kormány folyamatos mozgatásával próbálják kideríteni, mikor kerül a jármű a stabilitás határára, és amikor kell ennek megfelelően beavatkozniuk. A járművezetők többsége azonban nem versenyző. Az információ hiányán túl további problémát okoz, hogy még ha rendelkeznénk is a megfelelő mozgásállapot-visszacsatolással, a vezetőnek sem ideje, sem képessége, sem eszköze nincs a helyes beavatkozásra.
Miért? A járműről, annak környezetéből a vezető irányába nagy sebességgel áramlik az információ, amíg azonban ebből valamilyen tudatos reakció lesz, ez az áramlás lényegesen lelassul. Ehhez hozzáadódik az izmok reakcióideje, valamint ezek függése a vezető pillanatnyi állapotától, továbbá az a tény, hogy nem mindenről rendelkezik információval. Ezek együttesen eredményezik az adott helyzetben a nem megfelelő reakciót. Az intelligens járműrendszerek ezt a szabályozó kört nyitják fel, és akár a járműről, akár a jármű környezetéről gyűjtött információ alapján küldhetnek figyelmeztetést a vezetőnek, vagy avatkozhatnak be a jármű viselkedésébe, úgy is, hogy a vezető szándékát támogatják, de úgy is, hogy a vezetőt bizonyos időre felülbírálják, és annak szándékával ellentétes hatást fejtenek ki. Azt gondolom, hogy itt már érezhető az intelligens rendszerek alkalmazásának egyik központi problémája: valóban ki lehet küszöbölni a vezetőt az irányítási hurokból? Ennek a kérdésnek a megválaszolása kevésbé műszaki, sokkal inkább jogi és erkölcsi kérdés.
A menetdinamikai szabályozó rendszerek alkalmazásának feltételei
Hogy megértsük az intelligens járműrendszerekbe való beavatkozás lehetőségeit, röviden be kell mutatni, hogyan történik a jármű hagyományos irányítása, azaz hogyan vezetünk. Amikor a vezető a járművet irányítja, egy irányvektort fogalmaz meg, amit aztán a rendelkezésére álló kezelőszervek - kormánykerék, fékpedál, gázpedál, váltókar - segítségével közvetít az egyes, ma még diszkréten irányított aktuátorok - a motor, a váltó, a kormánymű és a fékrendszer - irányába. Az ezek által kifejtett hatások - motornyomaték, kormányzási szög, váltó fokozat - eredményeképp a gumiabroncs és talaj közötti erők és nyomatékok a járművet bizonyos irányban elmozdítják. A vezető az általa képzelt irányvektorral összehasonlítva - ugyancsak diszkrét módon - korrigálja azt.
A 2. ábra egy mai járművezető-aktuátor információátviteli rendszerét mutatja. A vezető az adott aktuátorral az annak használatával kapcsolatos szándékát közvetlenül közli, azaz a nyomatékigényét a gázpedál lenyomásával, illetve a váltó megfelelő fokozatba kapcsolásával, az irányra vonatkozó igényét a kormány elforgatásával, illetve a lassulásra vonatkozó szándékát a fékpedál lenyomásával. A kapcsolat a vezető és az adott aktuátor között direkt, az esetek jelentős részében mechanikus, illetve pneumatikus vagy hidraulikus. Természetesen az egyes aktuátorok már közvetlenül is kommunikálnak egymással, példaként a kipörgésgátlót lehetne említeni, amikor a rendszer a nagy nyomaték hatására kipörgő kereket érzékel, nemcsak a féken keresztül avatkozik be, hanem a motor nyomatékát is automatikusan csökkenti. Ahhoz, hogy a korábban említett intelligens rendszerek működni tudjanak, szükség van az egyes aktuátorok vezetőtől független működtetésére is, aminek megoldása csak elektronikusan történhet. A menetdinamikai szabályozó rendszerek szempontjából legfontosabb elemek az elektronikus motor, a váltó, a kormány, a felfüggesztés és a fékrendszerirányítási lehetőség. Az elektronikus motor irányítási - a power-by-wire - rendszer a tetszőleges, gázpedálállástól független nyomatékigény kielégítését teszi lehetővé, a kormányrendszerbe történő elektronikus beavatkozás - angolul steer-by-wire - bizonyos feltételek mellett az autonóm kormányzást, az elektronikus fékrendszer - brake-by-wire - az autonóm fékezést biztosítja, hasonlóan a váltó elektronizálása a megfelelő fokozat kiválasztását, illetve a felfüggesztés jellemzői is módosíthatók.
Az elektronikus fékrendszer, illetve amit ma ezen értünk, haszonjárművekben 1996 óta szériafelszereltségnek számít, személygépkocsikban most kezd tipikussá válni. A rendszer az irányítása szempontjából valóban "brake-by-wire", hiszen a vezető lassulásra vonatkozó igényét egy redundáns szenzorral mérjük, majd egy sor más jellemző alapján a központi vezérlőegység kiszámítja, hogy az adott keréken milyen fékezési nyomatékot kell megvalósítani, és a kerékhez közeli elektropneumatikus, hidraulikus, vagy a későbbiekben elektromechanikus aktuátor azt végrehajtja. Ilyen értelemben nincs közvetlen (mechanikus, pneumatikus) kapcsolat a fékpedál és a kerékfék között, és az eddigi tapasztalatok alapján ezek a rendszerek magas megbízhatósággal működnek. Ami miatt mégis minden jármű fel van még szerelve hidraulikus vagy pneumatikus back-up rendszerrel, azt a vevői igény és bizonyos fokú bizalmatlanság indokolja, azonban ez a rendszer a fékezési folyamatban csak akkor vesz részt, ha az elektronikus rendszer meghibásodott.
A kormányrendszer a járműdinamikára és a jármű irányíthatóságra gyakorolt szempontból a másik leglényegesebb, elektronikusan irányítható alrendszer. A hagyományos kormányrendszerek esetén a vezető kormánykeréken kifejtett, kormányzásra vonatkozó szándékát mechanikus szerkezettel visszük át a jármű kormányzott kerekeire, és a jármű tengelyterhelésétől függően biztosítunk a vezető számára rásegítést. Hagyományosan ez hidraulikus rendszerrel történik, aminek az irányíthatósága nehézkes, valamint drága. Emiatt egy sor, a jármű kormányzását javító funkció megvalósítása problémába ütközik. Ez indokolja azt, hogy alapvetően személy-, de hamarosan haszonjárművekben is alkalmazásra kerülnek az elektromos motorral támogatott kormányrendszerek. A rendszer méri a vezető által kifejtett kormányzási nyomatékot, és ennek, valamint további járműjellemzők függvényében fejt ki rásegítő nyomatékot. Ha a kormánykereket a kormányszerkezettel összekötő rudat elvágjuk, a rendszer továbbra is alkalmas kormányzásra, azaz a rendszer egy valódi elektronikus kormánnyá - steer-by-wire - rendszerré válik. Az ún. nyomatékrásegítéses elektronikus kormányrendszer egy sor funkcióval szolgál, amelyek könnyítik a kormányzást és javítják a kormányzási érzést. Ilyen például a sebességtől függő rásegítő nyomaték, ami kis sebességnél nagy, a sebesség növekedésével csökken, vagy másik előnye a sebességfüggő kormányvisszatérítés. Az elektronikus kormányrásegítés másik típusánál a kormányzási áttételt lehet változtatni, azaz a rendszer hozzáad vagy elvesz a vezető által kívánt kormányszöghöz. Ezt a tulajdonságát a fékrendszer alapú menetdinamikai szabályozóval történő integrációnál használják ki.
A drive-by-wire rendszer következő eleme az automatizált váltó, amely közvetlen mechanikus kapcsolat nélkül működtethető már ma is. Amit lényeges megjegyezni, hogy a váltó nem tekinthető biztonságkritikus járműrendszernek, ezért az egykörös elektronikus architektúra kielégíti a rendelkezésre állás követelményeit. Az elektronika meghibásodása esetén rendszerint elérhető egy ún. limp-home funkció, azaz a váltó egy olyan módba kapcsol, ahol biztonsággal elhagyható a meghibásodás helyszíne, és elérhető a legközelebbi autójavító.
A felfüggesztés szabályozásának több módja létezik, mint az a 3. ábrán látható. Aktív felfüggesztésirányításról beszélünk akkor, amikor a járműtest és a kerék mozgásállapotától független erőt tudunk kifejteni, azaz szabályozott módon mind energiát vihetünk a rendszerbe, mind energiát disszipálhatunk. Az aktív felfüggesztéssel mind a dinamikus tengelyterhelés, mind a lengéskényelem egyidejűleg befolyásolható, azonban a gyakorlati megvalósítása - elsősorban az energiaigénye miatt - nem minden esetben egyszerű. Ez indokolja, hogy szériában a lengéscsillapító-szabályozáson alapuló ún. félaktív felfüggesztés van elterjedőben. Itt a szabályozás alapelve az, hogy ha az erő ellentétes irányú azzal, amit az optimalitás kritériuma alapján ki kellene fejtenünk, akkor a kis csillapítási állapotba kapcsolunk, ha megegyezik, akkor pedig vagy beállítjuk azt, vagy a legnagyobb erőt próbáljuk kifejteni. Ez a típusú szabályozás viszonylag egyszerű, mivel szabályozott módon disszipál energiát.
Menetdinamikai szabályozórendszerek
A menetdinamikai szabályozórendszerek a járműre szerelt szenzorok jelei alapján működnek, azonban működésükhöz nincs szükség a vezető közvetlen beavatkozására, hanem a kialakult és az általuk optimálisnak ítélt mozgásállapot közti különbség hatására jönnek működésbe. Ilyen értelemben már tekinthetők autonóm rendszereknek, azonban közös jellemzőjük, hogy a vezetőt nem bírálják felül, hanem támogatják az általa meghatározott irány követésében. Ide tartoznak azok a menetdinamikai szabályozó-rendszerek, amelyek az előző részben bemutatott elektronikus aktuátorokat felhasználva befolyásolják a jármű dinamikáját. A menetdinamikai szabályozórendszereket két csoportba lehet osztani: az egyik a jármű síkbeli - tehát az út síkjában történő - dinamikáját befolyásolja, míg a másik az út síkjától eltérő, dőléses, bólintási mozgásokat tudja megváltoztatni.
A menetdinamikai szabályozórendszerek közös tulajdonsága, mint az a 4. ábrán látható, hogy a jármű és a talaj közötti erővektor irányát és nagyságát módosítják. Ha a 4. a ábrán látható modell mellső tengelyének bal első kereke erővektorát tekintjük, látható, hogy amennyiben a hátsó tengelyen lévő kerekeken fellépő oldalerő lecsökken, akkor a mellső tengelyen látható nagy oldalirányú erő a járművet megperdíti a súlyponti tengelye körül, és a jármű kiperdül. Hasonló esetet idézhetünk elő, ha alacsony tapadású úton kanyarodás közben behúzzuk a kéziféket, a jármű kiperdül. Logikusan adódik a következtetés, hogy ebben az esetben a mellső tengelyen lévő kerékre ható oldalirányú erő csökkentésével a helyzet kezelhető lenne. A vezetőnek azonban nincs erre lehetősége, a menetdinamikai szabályozó-rendszer viszont éppen ezt teszi: a korábban bemutatott elektronikus fékrendszeren keresztül tudja fékezni ezt a kereket, és ezzel olyan, a satírozott területtel arányos nyomatékot képes kifejteni, ami a járművet stabilizálja.
Hasonló elven működik a jármű borulását felismerő és megakadályozó rendszer, ami szintén a kerékerő vektorok manipulációján alapszik, mint azt a 4.b ábra mutatja. Magas súlypontú járművek (SUV, haszonjárművek) esetén a túl nagy kanyarsebesség ahhoz vezet, hogy a centrifugális erő és a keréken oldalirányban fellépő kerékerő alkotta erőpár a járművet felborítja. Logikusan adódik a következtetés, hogy ezen erőpár nyomatékának csökkentésével a felborulás elkerülhető. Mint az ábrán látható, az adott oldali kerék blokkolásával (illetve magas szlip tartományba történő fékezésével) az oldalirányú erő jelentősen csökken. Eközben természetesen csökken a jármű sebessége is, ami a centrifugális erő csökkenéséhez vezetve stabilizálja a jármű mozgását.
A menetdinamikai szabályozórendszer tervezésével szembeni alapvető követelmény, hogy ez a rendszer a vezetőnek a kormánykeréken keresztül kifejezett szándékát (mivel a rendszer más bemenettel nem rendelkezik) kövesse, azaz egy alkalmasan definiált referencia- vagy virtuális járműmodellből kiszámítjuk az adott kormányszöghöz és az aktuális sebességhez tartozó legyezési szögsebességet, és amennyiben a járművön mért érték ettől bizonyos határon túl eltér, a fék- vagy a kormányrendszeren keresztül beavatkozunk. A fentiek azt is jelentik, hogy a rendszer minden esetben végrehajtja a vezető támogatását, tehát ha az rosszul kormányoz, a rendszer az utat szegélyező árok irányába is segíteni fogja. Még egy fontos jellemzője van ezeknek a rendszereknek: ún. fail silent jellegűek, azaz amennyiben a rendszer hibát észlel (nem plauzibilis szenzorjel, a beavatkozás hatásossága csökken aktuátorhiba miatt), akkor biztonságosan kikapcsol. Ami nem történhet meg, és ezt garantálja a rendszer bonyolult biztonsági szoftver része: a beavatkozás nem a vezető által kívánt irányban történik.
A fékrendszer alapú menetdinamikai szabályozó működése egyszerű: a túlkormányzottá váló - azaz a vezető ellenkormányzása ellenére kanyarodó - jármű esetén a kanyar szerinti külső mellső kerék és a pótkocsi megfékezésével a jármű viselkedése stabilizálható, míg az alulkormányzottá váló jármű a vezető elkormányzása ellenére tovább egyenesen haladna, azonban a kanyar oldali belső kerék egyoldalú fékezésével olyan nyomatékot tudunk kifejteni, amely a járművet a kanyar irányába forgatja.
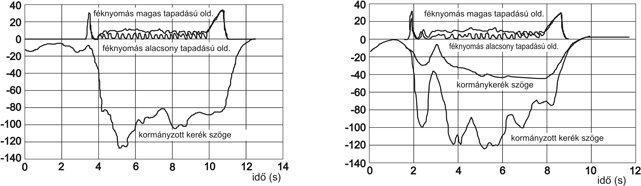
Mint korábban már említettük, az elektromos kormány (mind a nyomaték, mind a szög rásegítésű, illetve a teljesen elektronikus, back-up nélkül) lehetőséget biztosít a jármű dinamikájának aktív befolyásolására a kormányon keresztül is. A következő generációs menetdinamikai szabályozórendszerek a fékrendszereken kívül a kormányba is be tudnak avatkozni annak érdekében, hogy a jármű viselkedését stabilizálják. A filmfelvétel ennek egy megvalósítását mutatja: a vezető folyamatos gázadással állandó sugarú körön próbál kanyarodni. Hagyományos rendszer esetében a növekvő sebesség miatt a jármű kiperdülne, a vezető ellenkormányzással és gázelvétellel tudhatja azt kompenzálni, bár ez jelentős gyakorlatot igényel. Az elektronikus kormány alapú menetdinamikai szabályozórendszer érzékeli ezt a helyzetet, és ellenkormányzással valamint gázelvétellel a járművet a kívánt irányba kormányozza. Amit fontos itt megjegyezni: bár a kormánykerék (azaz a vezető irányra vonatkozó szándékát kifejező jel) másik irányban áll, mint a kormányzott kerekek, ez a rendszer sem bírálja felül a vezetőt, hiszen a jármű abba az irányba halad, amerre a vezető kívánja. Ezt a helyzetet mutatja az 5. ábra.
A kormány és fékrendszer alapú beavatkozás további lehetőségeket kínál. Az ABS - blokkolásgátló - rendszer tervezése egy sor kompromisszumot tartalmaz, ezek egyike az osztott tapadású felületen (azaz az egyik oldali kerekek alatti tapadás lényegesen különbözik a másiktól) történő fékezés. A két követelmény, amit ki kell elégíteni, nevezetesen a fékút és a vezető kormányzási korrekciója, egymással ellentétben állnak. Ha csökkenteni akarjuk az utóbbit, az ún. select low stratégiát kellene alkalmaznunk, azaz mindkét oldalt az alacsonyabb tapadású oldalon elérhető fékerővel fékezzük, ez esetben ugyan nem keletkezik nyomaték, azaz a vezetőnek nem kell azt kompenzálnia. Ebben az esetben azonban a fékút lesz hosszabb, hiszen nem használjuk ki maximálisan a nagyobb tapadású oldalon elérhető fékerőt. A másik lehetőség, hogy a járművet a nagyobb tapadású oldalon elérhető fékerővel fékezzük, ekkor természetesen a fékút csökken, azonban a vezetőnek jelentősen többet kell - ha tud egyáltalán - kompenzálnia. Az ABS e két követelmény közötti kompromisszumos helyzetet eredményezi. Amennyiben azonban a fenti helyzetben az elektronikus kormányon történő beavatkozással már a fékezés kezdeti szakaszában tudjuk a fellépő helyzetet irányítani, a fellépő kiperdítő nyomaték lényegesen kisebb lesz, és nagyobb fékerőkülönbséget engedhetünk meg.
Az 5.a ábra a hagyományos járművel történő fékezést mutatja. Látható, hogy az adott manőver a vezetőtől több mint 120 fokos ellenkormányzást igényel, és emiatt az alacsony és magas tapadású oldal között kisebb fékerőkülönbség engedhető meg. Az elektronikus kormánnyal történő beavatkozással a vezetőtől kívánt kormányzási beavatkozás a harmadára csökken, miközben a kormányzott kerekek természetesen a korábbihoz hasonló nagyságrendben kormányzódnak, és az adott manőver alatt a fékerőkülönbség nagyobb lehet, ami a fékút közel 10 %-os csökkenését eredményezi, ahogy az 5. ábrán látható.
Ez a példa jól mutatja, hogy az elektronikus rendszerek alkalmas integrálásával hogyan növelhető a hatásosságuk.
Összefoglalás
Jelen cikkben alapvetően a jármű oldal- és dőlésstabilitásának irányítását emeltük ki, ugyanis ezen rendszerek önállóan, azaz csak a jármű mozgásállapotáról információval rendelkezve avatkoznak be, és - nagyon fontos kiemelni - a vezető szándékát támogatva, nem pedig helyette döntve. A járművet irányító rendszerek tárgykörébe tartoznak a jármű hosszirányú dinamikáját befolyásoló rendszerek, mint az adaptív sebességtartó berendezés vagy annak továbbfejlesztett változata, az automata vészfékezési rendszer, azonban ezek már nemcsak a jármű jellemzői alapján avatkoznak be, hanem információt is gyűjtenek a jármű közvetlen környezetéről is. Másik jellemzőjük, hogy e rendszerek a vezető közvetlen szándékától függetlenül is képesek beavatkozni, illetve a vezetőt teljes mértékben felülbírálhatják (pédául az automatikus vészfékrendszer), ilyen értelemben nem tartoznak a jelen cikkben leírt rendszerek körébe, külön tárgyalást igényelnek.
Fontos azonban megemlíteni, hogy ezek a rendszerek is igénylik platformként az első fejezetekben leírt, elektronikusan szabályozott mechatronikus alrendszereket (kormány, váltó, fék) és a menetdinamikai szabályozórendszereket is, mivel ezek képesek a jármű kívánt iránytól való eltérését korrigálni. A 6. ábra mutatja a járműrendszerek irányításának új struktúráját, ahol a döntéshozatali, fölérendelt irányítási és a végrehajtási alárendelt szint elválik. A kommunikáció tartalma a két szint között a korábban már említett irányvektor, amely a vezető szándékából és a környezetből/ről információval rendelkező szenzorok jeleiből áll össze. A végrehajtó szint az aktuátorain keresztül megfelelő beavatkozással ezt követi, illetve amennyiben eltérés lép fel, a reaktív rendszerein keresztül (ezek a menetdinamikai szabályozórendszerek) beavatkozik. Ez az architektúra szükséges ahhoz, hogy bármilyen jövőbeni intelligens rendszer működhessen.
Kulcsszavak: elektronikus alrendszerek, szabályozott járműdinamika, stabilitás, autonóm beavatkozás, rendszerintegráció
Lehetőségek Mellette szól Ellene szól A közúti személy és teherforgalom Lényegesen kisebb Alacsonyabb csökkentése és más eszközök környezeti hatás flexibilitás igénybevétele A közúti infrastruktúra fejlődése Erős gazdasági hatás Lassú, társadalmi felgyorsul, intelligenssé válik (munkahelyek, stb.) tiltakozással jár A nem út jellegű közlekedési Azonnali hatás Az adott problémát infrastruktúra fejlesztése csak részben kezeli A közlekedési sűrűség növelése Nincs infrastrukturá- Jelentős mértékben (kisebb követési távolság, lis igénye csökkentheti a nagyobb megengedett sebesség) közlekedés biztonságát A jármű megengedett terhelésének Jelentősen megnöve- Az infrastruktúra és méreteinek növelése kedett szállítási terhelése megnő, vagy kapacitás módosítást igényel
1. táblázat * A közlekedés volumenének kezelésére vonatkozó alternatívák
1. ábra * Miért nem képes a vezető a stabilitás határán mozgó járművet
irányítani?

2. ábra * A jármű diszkrét irányító rendszere
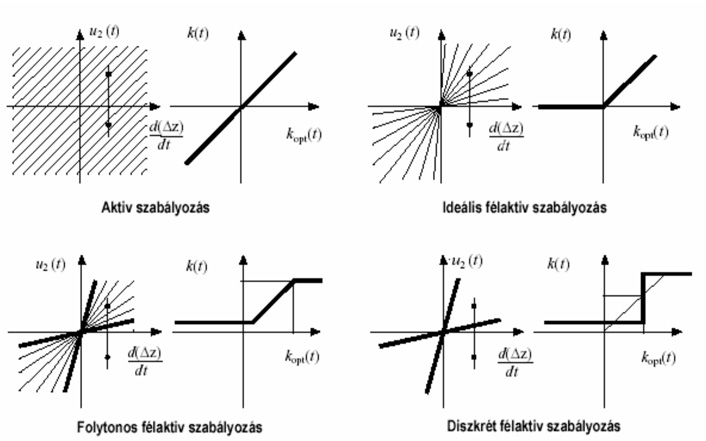
3. ábra * Felfüggesztésirányítási stratégiák
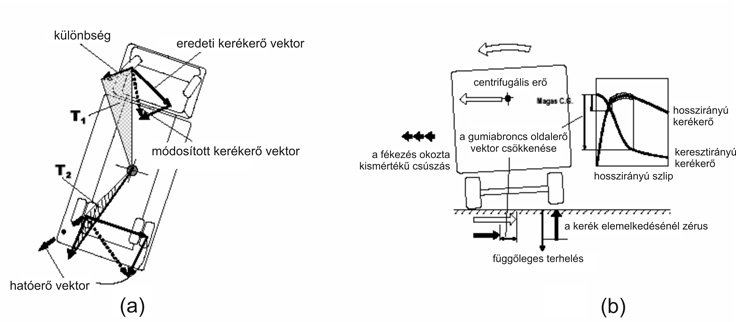
4. ábra * (a) síkbeli irányítás; (b) dőlés- és bólintásszabályozás

5. ábra * (a) hagyományos ABS és (b) elektronikus kormánnyal történő beavatkozás
6. ábra * Az intelligens járműirányítás szintjei