
1. ábra * Kezet fogunk vagy kezet rázunk?
Az 1980-as években gazdasági hetilapunk gépészmérnök énemet megragadó címlappal jelent meg; Szorít az idő - volt az ábra fölé írva. Az egész címoldalt kitöltő képen két egymásnak feszülő, szkanderező kart lehetett látni, a vállaktól az egymással szembeforduló, összekapaszkodó kézfejekig, a könyökök a játék szabályai szerint asztallapra támaszkodva. Az ábrán az volt különleges, hogy míg az egyik kar egy izmos emberé, a másik egy akkor még különös, kifinomultan bonyolult robotkar volt, csuklókkal, meghajtókkal, érzékelőkkel és a hozzájuk tartozó vezetékekkel, kábelekkel, elektronikus alkatrészekkel. A címlap jól fejezte ki a műszaki, technikai fejlődésnek a gazdasági életre ható szorítását, nekem azonban más miatt is tetszett. Robotokról akkor már sokat lehetett hallani tudományos folyóiratokban, konferenciákon, és azoknak a mesterséges intelligenciához kapcsolódó, a tudományos-fantasztikus irodalmat régóta foglalkoztató "képességei" mellett a kép itt egy másik, filozófiai (intellektuális) szempontból sokkal kevésbé érdekesnek tűnő feladatra utalt. Az ember értelmének és az általa létrehozott gépnek kölcsönzött "tudás" sokat elemzett kapcsolata, együttműködése, néha harca után az ember és a gép fizikai kapcsolata vált a robotika gépészmérnökök számára mindmáig feladatot adó tudományos, szakmai kihívásává. A robotok kezdeti látványos mozgása, sikeres, pontos és fáradhatatlan működése gyártósorokon elfedte nem szakértők számára azokat a gondokat, anomáliákat, amelyeket ezeknek a gépeknek a környezetükkel való érintkezése jelent, azon belül is különösen az emberrel.
Bevezetés
Mindmáig akciófilmek hatásvadász, atavisztikus félelmeket közvetítő része a nálunk összehasonlíthatatlanul nagyobb fizikai erővel rendelkező állatokkal, illetve tudományos-fantasztikus filmekben már gyakran gépekkel szembeni, reménytelennek tűnő harc. A robotok meghajtó egységeik erejével könnyen összezúzzák a környezetükben lévő tárgyakat, élőlényeket - velük szemben csak több-kevesebb értelmi fölényünkre támaszkodhatunk. Nem csoda, hogy a robotok munkaterében, működésükkor általában tilos embernek tartózkodnia, a robotosított gyártósorokat többnyire rácsokkal zárják el avatatlan látogatóktól, és az egyetemi kísérleti laboratóriumokban bekövetkezett baleseteket a bulvársajtó gyakran tálalja a "megtámadta a robot a tervezőjét" címszalaggal.
Az Európai Unió 5. Kutatási Keretprogramja keretében magyar kutatók vezették azt a gépészmérnökökből és orvosokból álló nemzetközi kutató-fejlesztő csoportot, amelyik gyógytornáztató robotokat fejlesztett. A RehaRob (Rehabilitation Robotics) projekt eredményeként sikeresen megvalósított rendszer - a FizioRobot projekt további támogatásával - jelenleg már klinikai kipróbálás szakaszában van. Nemzetközi robotkonferenciákon a látványosnak mondható robotos gyógytornakísérletekről készült videófelvételek ugyanolyan sikert aratnak, mint a nemzetközi űrállomásra fejlesztett CanadArm robotkar vagy más, a napisajtóban is gyakran megjelenő, például orvosi műtéteket végző, injekciót adó robotrendszerek. Mi a titka a sikernek? Az, hogy miközben a robot könnyen tör-zúz, érezhetően nehéz feladat pontosan, meghatározott erővel, biztonságosan megérintenie dolgokat, különösen a sérülékeny élőlényeket.
A RehaRob projekt ismertetése ürügyén röviden összefoglaljuk a feladat nehézségének mechanikai gyökereit, az elméleti kutatásoknak a gépészeti fejlesztő munkára gyakorolt hatását és annak várható eredményeit, elsősorban az orvostudomány fejlődéséhez biztosított műszaki háttér vonatkozásában.
Digitális pozíció- és erőszabályozás robotokon
Robotok megjelenését régóta jósolta a tudományos-fantasztikus irodalom. Hogy ez mégis csak az 1970-es években következett be, arra a számítástechnika fejlődése ad magyarázatot. Ekkor jelentek meg és váltak a mérnöki kutatások számára is elérhetővé a digitális számítástechnikai eszközök. Ezeknek programját könnyű volt változtatni, kísérletezni velük, illetve a szabályozástechnika addigra már kialakult módszereinek kombinálásával a robotokat a különböző feladatokhoz, környezetükhöz látszólag jól alkalmazkodó intelligens gépekké lehetett fejleszteni. Az alapgondolat ennyi idő távlatából visszatekintve egyszerűnek tűnik: a robotok megfogói, az azokban lévő szerszámok, megmunkáló eszközök előírt pozíciókba, előírt pályák mentén mozgathatók a klasszikus, csupán mechanikus elemeket tartalmazó gépekhez hasonlóan. Az első egyszerű szabályozókkal az elektromos, nagyobb erők esetén hidraulikus meghajtó egységek rugalmas és csillapító gépelemeket utánoztak, akkor is már egyfajta virtuális valóságot kialakítva. Nagy előnye ezeknek a robotoknak a klasszikus, csak mechanikus elemeket tartalmazó gépekkel, mechanizmusokkal szemben, hogy könnyen változtathatjuk programjaikat, azokon keresztül pedig a virtuális, imitált szerkezetek mechanikai tulajdonságait. Mindehhez nem kell lemennünk a műhelybe, hogy új alkatrészeket barkácsoljunk, a számítógép klaviatúráján keresztül érjük el ugyanazt az eredményt.
A digitális technika tehát egyértelműen teret nyert, annak ellenére, hogy a robotok mindmáig nagyon drága gépek, alkalmazásuk csak akkor kifizetődő, ha valóban kihasználjuk programozhatóságukat, ha sok, eltérő feladatra alkalmazhatóak. Az első ipari alkalmazások a szerelő- és gyártósorokon azonban jórészt csak olyan feladatokat oldottak meg, ahol a robot nem igazán érintkezett a munkadarabokkal. Például festettek a robotokkal, ahol csupán közel kellett menni a tárgyakhoz, de hegesztés esetén is sokszor elegendő volt csupán kellően közel lenni hozzájuk. A szerelősorokon, ahol munkadarabokat meg is kellett fogni, fel kellett emelni, már komoly gond volt a megfelelő erő alkalmazása az érintkezéskor - és ezt az első ilyen robotokon (lásd például a híres SCARA) mechanikusan próbálták megoldani. A robot nevében szereplő SC (selective compliance) is arra utal, hogy a robotnak nagyon eltérő mechanikai merevsége (pontosabban, szó szerint fordítva, lágysága) volt a különböző térbeli irányokban. Természetesen éppen a tárgyak megfogásának általában vízszintes síkjában volt a szerkezet lágyabb, ennek megfelelően pozicionálása ott pontatlanabb, míg arra merőlegesen merevebb, pontosabb.
A robotokon az érintkezési erők vonatkozásában említett mechanikus megoldások oka az volt, hogy a szabályozórendszerek számára a kontakterő egyébként viszonylag pontosan mérhető jelének alkalmazása nem volt biztonságos, és ez általánosságban még ma sincs megoldva. A piacon kapható robotokat csak pályákra, pozíciókra lehet programozni. Az erőszabályozásra képes robotok megjelenése még mindig várat magára, még akkor is, amikor egy-egy partikuláris célfeladatra a kérdést sikeresen oldják meg. Úgy mondják, ablaktisztító robotok azért nincsenek még, mert ott bizony nagyon nem mindegy, mekkora az érintkezési erő. Ha túl kicsi, az ablak piszkos marad, ha túl nagy, betörik.
Az 1980-as évek díjazott amerikai robotos versenyfeladatai között szerepelt az, amikor a robotnak asztalt kell terítenie egy romantikus vacsorához. Tudjon a robot borosüveget bontani (a dugóhúzáshoz nagy erő kell), aztán gyufát gyújtani (ehhez pontos, de kis erő szükséges), majd gyújtson azzal gyertyát is (ehhez megfelelő pozicionálási pontosság kell). Természetesen ezzel párhuzamosan megjelentek az ipari feladatok: a robot polírozzon (Raibert - Craig, 1983; Steven - Hewitt, 1987) fúrjon-faragjon, húzzon, nyomjon adott erővel, közvetítse erővisszajelzéssel az érintkezési erőket a manipulátorokat távirányítással kezelő személy kezére (Whitney, 1987; Stépán et al., 1990). Ez utóbbi terület ma különösen nagy kutatási kapacitásokat köt le, elsősorban az internetes alkalmazások reménye miatt: távolról tapinthatunk meg majd árucikkeket egy virtuális boltban, képzeletben megemelve érezhetjük azok súlyát, megsimítva tapinthatjuk felszínét - nem is beszélve a virtuális erősport játékok, edzőgépek fejlesztésének kérdéseiről.
A következőkben arról szólunk, mi okozza a fejlesztések számára kutatási szempontból az egyik legnehezebb feladatot, miért veszélyes robotok emberekkel való fizikai érintkezése.
Dinamikus instabilitás digitálisan szabályozott gépeken
Mi is az a jelenség, amit a sikerorientált fejlesztési beszámolók, kutatási eredmények bemutatói, videofelvételek, ismeretterjesztő riportok nem említenek, és amit a kutatók annyiszor tapasztalnak elkeseredetten laboratóriumaikban? Az, hogy a robotok könnyen elvesztik stabilitásukat. Ez a jelenség pozíciószabályozás esetén ismert probléma, viszonylag könnyen kezelhető, de erőszabályozás esetén mindmáig gondot okoz, azzal a nemzetközi szakirodalom több-kevesebb folyamatossággal mindmáig foglalkozik (Natale, 2003; Baeten - Schutter, 2003; Stépán, 2001).
Ráadásul robotok esetén nem is az a statikus értelemben vett instabilitás jelentkezik, amit akkor tapasztalunk, amikor egy asztallapra állított ceruza eldől, hanem az, amikor rezgések keletkeznek. Mint amilyen az akadozó csúszások jelenségébe sorolt ajtónyikorgás, vagy a vontatott kerekek táncolása az áruházi bevásárlókocsikon, a villanyoszlopok rezgése erős szélben - ezeket a gépészmérnökök öngerjesztett rezgéseknek nevezik. Azért instabilitási jelenségek, mert az ilyen esetekben a szerkezetek külső periodikus gerjesztő hatás, külső rezgés nélkül, mintegy önmaguktól rezegnek be.
Ennek a dinamikus instabilitásnak minden esetben más fizikai oka van. A digitálisan szabályozott gépek esetén ez az ok pontosan a digitális jellegben keresendő. Azaz éppen az okozza a problémát, ami legfontosabb előnyük a robotoknak a klasszikus gépekkel szemben. A digitális szabályozás ugyanis a következő módon működik: a számítógép megkapja a robot pozícióját, sebességét, illetve adott esetben a kontakterőket jellemző, mért paramétereket a szenzoroktól, azokat feldolgozza, számol velük, majd kiadja a megfelelő utasítást a meghajtó egységek erősítői felé. Természetesen mire a megfelelő utasítás megérkezik, addigra a robot már kissé eltérő pozícióban lesz, más sebességgel, a szabályozó jelek kiszámításához használtaktól kissé eltérő érintkezési erőkkel. A késés nagyon kicsi, sokszor zérusnak tekinthető, a másodperc tizede, százada..., ma néha már csak ezrede. Mégis, a kis időkésés reciprokának megfelelő mintavételezési frekvenciáktól sokszor nagyságrendileg is eltérő, kisfrekvenciás rezgések keletkezhetnek, elsősorban az erőszabályozáshoz kapcsolódóan.
A rezgések hasonlóak például a Parkinson-kóros emberek remegéséhez. Valóban, az embereken tapasztalt rezgési jelenségek mögött is ilyen, bár számértékben jelentősebb időkésések vannak, azokat pedig reflexeink lassúságával hozhatjuk kapcsolatba (Enikov - Stépán, 1998; Stépán - Kollár, 2000). Ezért remegünk egyensúlyozáskor. Ezért látjuk magunk előtt Ernst Hemingway Az öreg halász és a tenger című regényében Santiagót remegő kézzel szkanderezni a havannai kocsmában hosszú órákon át. A legtöbb nyelvben a kézfogást kézrázásnak is mondják, utalva annak általában dinamikus, rezgési jellegére.
Ha egy pohár vizet kell átadnunk valakinek, a legkritikusabb pillanatok, amikor a víz könnyen kilöttyen, éppen azok, amikor mind a ketten még nagy erővel szorítjuk a poharat, megzavarva egymást az erő mértékének szabályozásában. A remegések oka a két szabályozórendszer időkésésében rejlik, ami nem tud stabil módon megbirkózni az ismeretlen merevségű másik rendszerrel. Hasonló a helyzet ahhoz, amikor szűk folyosón futunk össze valakivel, hol erre, hol arra próbálva kikerülni egymást (2. ábra). Néha már-már nevetséges ide-oda lépkedésbe kezdünk: mire balról kerülnénk meg, a másik is arra mozdul, mire jobbról, a másik is arra mozdul, és reflexeink késése nem engedi, hogy végre kikeveredjünk a helyzetből. Sok esetben pedig éppen a kivárás, reagálásunk késésének növelése segít.
A 3. ábra mutatja azt a legegyszerűbb mechanikai modellt, ami a klasszikus newtoni mechanika analitikus megoldási módszereivel is végigszámolható. Az itt csupán egy szabadsági fokú, vízszintesen elmozduló testet úgy próbáljuk a rugón keresztül a merev falnak nyomni, hogy közben ott előírt erő keletkezzék. A rugó deformációjának mérésével küldünk jelet a digitális szabályozórendszernek, ami az f mintavételezési frekvenciának megfelelő késéssel reagál Q erővel a meghajtón keresztül. A newtoni mozgásegyenletek matematikai stabilitási vizsgálata a 4. ábra szerinti stabilitási térképet adja, ahol a vonalkázott területek utalnak a stabil működésre. A térkép vízszintes tengelyén a szabályozatlan tömeg-rugó rendszer n sajátfrekvenciájának és a digitális szabályozás f frekvenciájának hányadosa látható, míg a függőleges tengelyen a szabályozás P erősítési tényezője van.
A térkép ilyen egyszerű rendszer esetén is jelentkező viszonylagos bonyolultsága mutatja, hogy óvatosan kell bánnunk a szabályozás erősségével, és azt növelni csak pontosan hangolt frekvenciaarányok esetén lehet. Azaz nem mindegy, hogy a különböző merevségű és így eltérő sajátfrekvenciájú tárgyakat, környezetet milyen mintavételezési frekvenciájú digitális szabályozóval érintjük meg. A stabilitási térkép feletti diagram jól mutatja, hogy a stabilitás elvesztésekor meglepően alacsony a.f frekvenciájú rezgések keletkezhetnek a rendszerben meglévő egyéb karakterisztikus frekvenciákhoz képest, melyek a mintavételezési frekvencia 0-50 %-a között változhatnak.
A fenti modell jól használható volt például a turbinalapátok polírozására fejlesztett robotokon (Steven - Hewitt, 1987; Stépán et al., 1990). Ott is rezgési gondokat jelentett, hogy a szárnyprofil keresztmetszetű turbinalapátnak a felületére merőleges merevsége erősen változik a profil mentén, miközben a polírozó szerszámot vezető robotkar végigcsúszik ezen a felületen. Márpedig a rezgő robot nem tud pontosan előírt érintkezési erőt biztosítani.
Már a nyolcvanas évek végén sokszor lehetett persze hallani szakmai vitákban, hogy a mikroprocesszorok sebességének közismert rohamos növekedésével a mintavételezéshez kapcsolódó időkésés által okozott stabilitási problémák el fognak tűnni. Nem így történt. Meglepő módon az ipari robotok mintavételezési ideje ma néha még nagyobb is, mint volt mondjuk tizenöt éve. Mindennek az az oka, hogy a robotok szabályozórendszere egyre kifinomultabb, és ezzel együtt egyre bonyolultabb lesz, azokat egyre magasabb szintű programnyelveken írják, mindig felhasználva a mára több száz kutatóévnyi munkával elkészített eddigi rutinokat. A memóriakapacitás és a processzorok sebességének növekedését tehát elhasználják a robotok egyre bonyolultabb vezérlő szoftverei.
Ezek után összefoglaljuk a RehaRob gyógytornáztató rendszer fejlesztésének néhány olyan problémáját, melynek megoldása egyedülállóvá tette a rendszert.
RehaRob - a rehabilitációs robot
A Budapesti Műszaki és Gazdaságtudományi Egyetem Gépgyártástechnológia Tanszéke kezdeményezte és vezette (dr. Arz Gusztáv és Tóth András nevének kiemelésével) azt az EU 5. Keretprogramban elnyert projektet, melyben a BME-ről a Műszaki Mechanikai Tanszék vett még részt, hazai partner volt az Országos Orvosi Rehabilitációs Intézet (OORI), külföldi egyetemi partner volt a bolgár Ruszei Egyetem, a brit University of Cardiff, míg a számos ipari partner között az orvosi műszereket gyártó és fejlesztő német Zebris GmbH, illetve a robotokat szállító svéd központú, de hazánkban is megjelenő ABB emelhető ki (ABB, 2005). A projekt 2000-ben indult, 2003-ban sikerrel zárult, azóta a FizioRobot projekt keretében folyik a rendszer klinikai vizsgálata, tesztelése.
A rendszer célja, hogy segítse az agyvérzést elszenvedett betegek rehabilitációját a gyakran görcsös végtagok intenzív mozgásterápiájával, gyógytornáztatásával. A RehaRob esetében, ahogy ezt az 5. ábra mutatja, az alkart és a felkart egy-egy hat szabadsági fokú robotkar tudja mozgatni, megfelelő ortéziseken keresztül. A rendszer fejlesztésekor sok vitát váltott ki az ipari robotok alkalmazásának terve. Ezt a projekt vezetői azzal indokolták, hogy csak így lesz remény a rendszer esetleges kereskedelmi forgalmazására, piacra bevezetésére, miközben például a szkeptikus brit kollégák szerint az ipari robotok jelentős holtideje, mintavételezési ideje lehetetlenné teszi a feladat megoldását, a robotokat is saját magunknak kellett volna fejlesztenünk. Ez viszont nem lett volna megvalósítható ilyen rövid idő alatt, korlátozott kutatói kapacitással és legfőképpen a betegekkel való érintkezés miatt megkövetelt megbízhatósággal.
Természetesen lehetetlen volna egy ilyen rövid ismertető keretében kitérni mindazokra a részfeladatokra, kisebb-nagyobb műszaki problémákra, melyeket a három év alatt a nagylétszámú nemzetközi kutatócsoport megoldott. Önkényesen említjük meg a robotok által elvégezhető gyakorlatok összeállításának feladatát (Kocsis et al., 2000), a robotok kiválasztását azok munkaterének megtervezésével (Tóth et al., 2001), a robotok tartószerkezetének tervezését és a beteget tartó négy szabadsági fokú mozgatható kezelőágy építését (Tóth et al., 2003), a robotok mozgásának szinkronizálását és azok pályavezérlő rendszerét felhasználó ún. külsőköri erőszabályozás kialakítását (Kovács et al., 2002), a robotok gyógytornáztató szakemberek segítségével történő betanításának megoldását az említett erőszabályzással (Fazekas et al., 2003).
Ahogy ezt a bevezetőben ismertettük, az eredetileg csak pályák követésére tervezett robotvezérlők jelentős mintavételezési idővel dolgoztak, ami a legkritikusabb esetekben elérte a 0,1 másodpercet is. A vezérlés egyébként nagyon korszerű pályageneráló algoritmusai további 0,4 másodperces holtidőt is eredményeztek, ami valóban kritikussá tette a külsőköri erőszabályozás stabilis megvalósítását. Hiába voltak az emberi és a robotkar közötti ortézisen elhelyezett hat szabadsági fokú erőmérők jelei 1 kHz frekvenciával mintavételezve, az alacsony frekvenciás (kb. 0,5 Hz-es) rezgések az első kísérletek során ugyanúgy jelentkeztek az ember (itt az ortézist mozgató gyógytornász) és a robot fizikai kapcsolatában, mint két ember kézfogásakor. A szerkezeti elemek merevségének megfelelő megválasztásával, az egyébként egyszerű külsőköri erőszabályozási paramétereknek a fenti mechanikai modellek elméleti vizsgálatára és sok-sok kísérleti munkára építő gondos beállításával sikerült a rezgési problémákat elfogadható szintre szorítani.
A rendszer természetesen egyelőre drága, betanítása nehézkes, szakértői rendszere fejlesztendő, szabályozása, "reflexei" tovább javítandók. A robot azonban türelmesen, kitartóan, az előírt sebességgel, lassan és fáradhatatlanul ismétli a betanított mozdulatokat. Az első klinikai eredmények biztatóak: a három hónapos klinikai teszt alatt a tizenkét kezelt beteg összesen mintegy 120 órányi gyógytornásztatásban részesült. A működés során biztonsági probléma nem merült fel, a tizenkét beteg állapotában pedig 5-25 %-os javulást sikerült elérni empirikus és mozgásanalizáló rendszerrel mért indexeikben. A rendszer teljesíti az EU Medical Device Directive (1993) szigorú biztonsági követelményeit.
Kitekintés
Mi várható a következő évtizedben? Nehéz megjósolni. Természetesen töretlenül fognak fejlődni a műtéteket segítő robotok, amelyek azonban továbbra is drágák lesznek, kivételes körülmények között alkalmazzák majd őket. Várhatóan széles körben fognak terjedni a RehaRobhoz hasonló gyógytornáztató, masszírozó gépek. A következő egy-két éven belül az ilyen rendszerek fejlesztése nálunk is olyan állapotba jut, hogy befektetők vizsgálhatják annak eladhatóságát, a mérnökök pedig próbálják majd gyártásának költségeit olyan szintre szorítani, ami már megtérülést ígér. Ebben a folyamatban kulcsfontosságú lesz például az, ami már a RehaRob projekt esetén is látható volt: a robotok fejlesztői az ilyen irányú robotértékesítések reményében komolyan nekiláttak a szabályozórendszer mintavételezési és holtidejének (a robot "reflexidejének") csökkentéséhez, ezzel segítve az emberrel való érintkezéskor elengedhetetlen erőszabályozások biztonságos megvalósítását.
A RehaRob gyógytornáztató robothoz kapcsolódó kutatásokat támogatta a European Commission IST-1999-13109 projekt, az Egészségügyi Minisztérium ETT-073/2003 projekt, az OTKA T043368 projekt és a TéT-BILAT CAN-1/03 projekt.
Irodalom
ABB (2004) http://www.abb.hu/
Baeten, Johan - Schutter, Joris De (2003): Integral Visual Servoing and Force Control. Springer, Berlin
Enikov, Eniko - Stépán Gábor (1998): Micro-chaotic Motion of Digitally Controlled Machines. Journal of Vibration and Control. 4, 427-443.
EU Medical Device Directive (1993) Council Directive 93/42/EEC of 14 June 1993 Concerning Medical Devices.
Fazekas Gábor - Fehér M. - Stefanik Gy. - Boros Zs. - Tóth A. (2004): Robotok alkalmazása féloldali bénultak felső végtagi gyógytornásztatásában. Orvosi Hetilap. 145; 1327-1331.
Kocsis László - Tóth A. - Fazekas G. (2000): Upper Limb Physiotherapy for Hemiparetic Using Industrial Robots. Proceedings of the 22nd Neumann Symposium on Medical and Biological informatics (Veszprém, November 9-10, 2000) 32-36.
Kovács László L. - Stépán G. - Jurák M. - Tóth A. (2002): Indirect Force Control Applied in Rehabilitation Robotics. Penninger Antal - Ziaja Gy. - Vörös G. (eds.): Proceedings of the Third Conference on Mechanical Engineering. May 30-31, 2002. Springer-Verlag, Budapest University of Technology and Economics, Budapest, Hungary, 853-857.
Natale, Ciro (2003): Interaction Control of Robot Manipulators. Springer, Berlin
Raibert, Marc H. - Craig, John J. (1981): Hybrid Position/Force Control for Computer Controlled Manipulators. ASME Journal of Dynamic Systems, Measurement and Control, 102, 125-133.
Stépán Gábor - Steven A. - Maunder, L. (1990): Design Principles of Digitally Controlled Robots. Mechanism and Machine Theory, 25, 515-527.
Stépán Gábor - Kollár László (2000): Balancing with reflex delay. Mathematical and Computer Modelling. 31, 199-205.
Stépán Gábor (2001): Vibrations of Machines Subjected to Digital Force Control. International Journal of Solids and Structures. 38, 2149-2159.
Steven, A. - Hewit, James R. (1987): Position and Force Control Applied to Robotic Polishing of Turbine Blades. Proceedings of the 3rd International Conference on Advanced Robotics (ICAR 1987, Versailles). 493-502.
Tóth András - Arz G. - Varga Z. - Varga, P. (2001): Conceptual Design of an Upper Limb Physiotherapy System with Industrial Robots. Integration of Assistive Technology in the Information Age. Mounir Mokhtari (ed.): Proceedings of the 7th International Conference on Rehabilitation Robotics. Institut National des Telecommunications (INT) & INSERM (U.483), Evry, France, 25-27, April, 2001, IOS Press, Amsterdam, 109-116.
Tóth András - Arz G. - Varga Z. - Varga P. - Papp J. (2003): Layout Optimization of a Geometrically Complex Rehabilitation Robotic System through Virtual Physiotherapy. Proceedings of the 8th International Conference on Rehabilitation Robotics. Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea, 22-25 April, 2003, 68-71.
Whitney, Daniel E. (1987): Historical Perspective and State of the Art in Robot Force Control. International Journal of Robotics Research. 6, 3-14.
1. ábra * Kezet fogunk vagy kezet rázunk?

2. ábra * Instabilitás egymás kikerülésekor, szűk folyosón
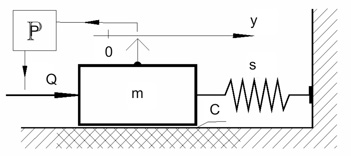
3. ábra * Erőszabályozás mechanikai modellje
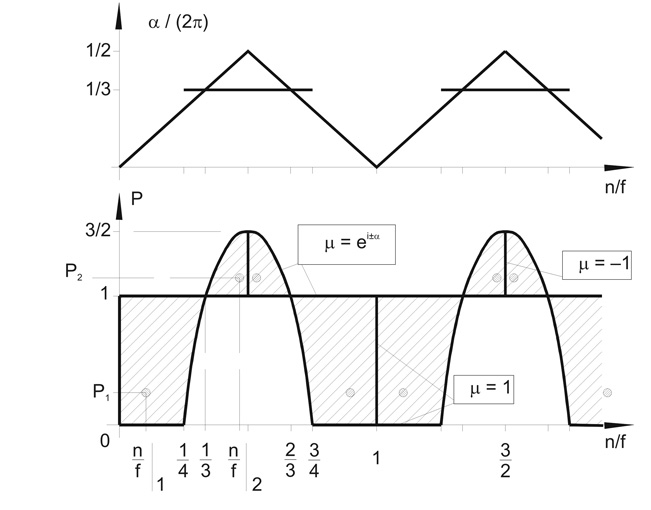
4. ábra * Erőszabályozás stabilitási térképe
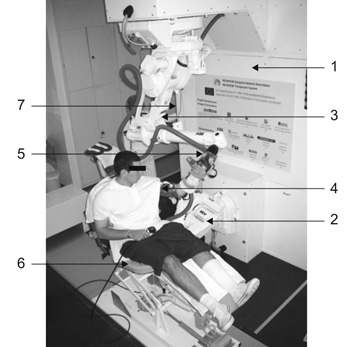
5. ábra * A RehaRob: 1 - állvány, 2 - IRB 140 ipari robot, 3 IRB - 1400H ipari
robot, 4 - felkar ortézis, 5 - alkar ortézis, 6 - kezelőágy, 7 - kezelő panel