Infokommunikációs hálózatok
Meteorológiai
adatok
azonosítása
hálózatfelügyeleti
mérésekből
|
Kóczy
T. László |
Botzheim
János |
|
az
MTA doktora, egyetemi tanár |
PhD-hallgató |
|
BME
Távközlési és Médiainformatikai
Tanszék, |
BME
Távközlési és Médiainformatikai
Tanszék |
|
SZE
Távközlési Tanszék |
botzheim  tmit.bme.hu tmit.bme.hu |
|
koczy tmit.bme.hu,
koczy sze.hu |
|
|
|
|
|
Sallai
Richárd |
Csányi
Kornél |
|
végzős
hallgató |
PhD-hallgató |
|
BME
Távközlési és Médiainformatikai
Tanszék |
BME
Távközlési és Médiainformatikai
Tanszék |
|
|
|
|
Kuti
Tamás
ügyvezető
igazgató, Linecom Kft. kuti.tamas linecom.hu |
Mobilszolgáltatást
megvalósító mikrohullámú hálózatok
esetében a vételi szintet befolyásolják
az adó- és a vevőállomás közötti
úgynevezett Fresnel-zónába bekerült
akadályok. Ezek az akadályok lehetnek ideiglenesen vagy
véglegesen az adott zónába került
mesterséges vagy természeti tárgyak, vagy az
éppen aktuális időjárás által
meghatározott mennyiségű csapadék, illetve
köd. A hálózatfelügyeleti rendszerbe célszerű
olyan intelligens döntési alrendszer beépítése,
amelyik a csillapítás mértékéből,
illetve annak időfüggő viselkedéséből
közvetlenül képes eldönteni, hogy mi okozhatta
a csillapítást. A cikk egy sikeresen befejezett
NKFP K+F projekt keretében megvalósult
hálózatfelügyeleti rendszer intelligens modulját
ismerteti. Bemutatja az intelligens döntéstámogató
rendszert és az ezt alkotó fuzzy
logika alapjait. A következőkben részletesebben
bemutatja az időjárási helyzet automatikus
identifikálására történő
alkalmazást.
1.
Bevezetés
A
mobilkommunikációt megvalósító
mikrohullámú hírközlő hálózat
felügyelő rendszere az ország egész területéről
rendelkezik információkkal a hálózat
működésére és üzemállapotára
vonatkozóan. Az egyes állomások vételi
szintjét csökkentik az adó- és a
vevőállomások közötti térben az
átvitel minőségét meghatározó
Fresnel-zónába belekerült akadályok.
Ezek az akadályok gyakran mesterséges vagy természeti
tárgyak, de ugyanilyen hatást vált ki az éppen
uralkodó időjárás által meghatározott
csapadék is, hiszen ez apró „tárgyak”
(esőcseppek) sokaságát jelenti a Fresnel-zónában.
A hálózatfelügyeleti rendszerbe integrált
intelligens döntési alrendszer a csillapítás
periodikusan lekérdezett mértékéből és
annak időfüggő viselkedéséből közvetlenül
képes olyan következtetés meghozatalára,
amelyik a csillapítás okát felismerve a
szükséges beavatkozásra ad javaslatot a
hálózatfelügyeleti rendszer kezelői
felületén. E tanulmányban csupán egyetlen
kérdésről szólunk, a hazánkra
jellemző mérsékelt égövi kontinentális
éghajlati zónában (nemzetközi szabványban
rögzített módon) megjelenő különböző
esőkategóriáknak a csillapítási értékek
megfigyeléséből kikövetkeztetett intelligens
felismerésére.
A
tanulmány egy sikeresen befejezett NKFP K+F projekt
(Kóczy−Veres, 2005) keretében
megvalósult demonstrációs hálózatfelügyeleti
rendszer egyik moduljával és a hozzá kapcsolódó
funkciókkal foglalkozik. A felügyeleti rendszer által
mért adási- és vételiszint értékekből
kiszámítható csillapítási értékek
időbeli változása alapján a rendszer GUI
(grafikus felhasználói interfész) felületén
megjeleníti az intelligens döntési alrendszer
által létrehozott következtetést, olyan
formában, hogy abból a kezelő áttekintést
tud nyerni a megfigyelt hálózati területen
jelentkező eső eloszlására, mennyiségére
és mozgására.
A
riasztások két eltérő jelenségcsoportra
utalnak. Az első csoportba tartoznak a mikrohullámú
állomások berendezéseinek hirtelen bekövetkező
vagy a hosszabb idejű üzem során fokozatosan
jelentkező hardver meghibásodásai vagy
funkcióromlásai. Ezeknél természetesen
karbantartói beavatkozást javasol a rendszer. A második
csoportba tartoznak a Fresnel-zónába került
akadályok miatt bekövetkezett vételi
szintcsökkenések. Ebben az esetben gyakran az adó
és/vagy a vevő helyének a megváltoztatására
is szükség lehet. Példa erre városban
egy reklámtábla elhelyezése egy háztetőn,
vidéki környezetben pedig az adó és a vevő
között elhelyezkedő erdősáv tavaszi kilombosodása.
Ez utóbbit az adóteljesítmény éves
ciklus szerinti automatikus utánállításával
lehet kompenzálni. Az esőzésből adódó
fading
a különböző terepakadályok okozta
csillapítástól az egy körzetben egyidejűleg
irányfüggetlenül jelentkező vételiszint-csökkenés
révén különíthető el.
A
következőkben az intelligens döntés meghozatalára
alkalmazott fuzzy alapú számítási
intelligencia módszerről ejtünk néhány
szót. A 3. fejezetben a mobilhálózat
felügyeletében alkalmazott fuzzy rendszert mutatjuk
be az időjárásmegfigyelési alkalmazással
együtt.
2.
A fuzzy rendszerek alapjai
Bizonyos
jelenségek nem írhatóak le pontosan a
matematikában és számítástechnikában
ma általánosan elterjedt kétértékű
logikával, ezért célszerű, hogy ne csak „igaz”
és „hamis” logikai értékeket
használjunk, hanem lehetőség legyen a kettő közötti
átmeneti, részleges igazságértékek
definiálására is például 0 és
1 között. Ez a gondolat vezette el a ‘60-as években
Lotfi A. Zadeh-et a fuzzy logika megalkotásához (Zadeh,
1965). A hagyományos mesterséges
intelligencia-megoldásokban általános a
kétértékű logika használata, ám
intelligensebb eszközöket nyerünk, ha az emberi
logikához jobban közelítő fuzzy módon
írjuk le a rendszerek viselkedését. A fuzzy
logikai változók a 0 és az 1 között
tetszőleges értéket vehetnek fel, a 0 jelöli a
„teljesen hamis” állítást, az 1
pedig a „teljesen igazat. Így például a
0,5 körüli érték jelképezi a „félig
igazat”, és a 0,9 a „majdnem igazat”. Az
arisztotelészi és Boole-i hagyományos kétértékű
logikai műveletek a fuzzy logikára is kiterjeszthetők. A fuzzy
logika segítségével definiálhatunk fuzzy
halmazokat, fuzzy szabályokat, és a szabályokból
következtető rendszereket is felépíthetünk.
Az alapfogalmakkal kapcsolatban a részletesebb leírás
iránt érdeklődöknek a (Kóczy − Tikk,
2000) könyvet ajánljuk.
2.1. Fuzzy halmazok
és műveletek
Az
A
fuzzy halmazt az úgynevezett tagsági függvénnyel
adhatjuk meg. A tagsági függvény minden egyes x
alaphalmazbeli értékhez egy a [0,1]
egységintervallumból vett µA
értéket
rendel aszerint, hogy az adott x
érték mekkora mértékben eleme (tagja) az
A
fuzzy halmaznak. E µA
egyértelműen megadja a fuzzy halmazt, ha magát az X
alaphalmazt ismerjük. A gyakorlati alkalmazások céljából
a műszaki rendszerekben leginkább a háromszög-, a
trapéz- és a Gauss-görbe (harang) alakú
tagsági függvények terjedtek el.
Az
1. ábra példájában
trapéz alakú fuzzy halmazokkal leírt
csillapítási tartományokat láthatunk
mindössze három kategóriát
megkülönböztetve: enyhe,
közepes és
nagy.
A
hagyományos halmazelméletben értelmezett három
alapműveletet végtelen sokféleképpen lehet
általánosítani a fuzzy halmazok elméletére.
A legelterjedtebbek a klasszikusnak számító
Zadeh-féle definíciók (Zadeh, 1965), amelyek a
fuzzy halmazok metszetét a tagsági értékek
minimumával, a fuzzy halmazok egyesítését
pedig a tagsági értékek maximumával
számítják ki, vannak azonban algebrai műveletek
segítségével megadható definíciók
is. A komplemenst általában az 1-re kiegészítő
érték adja meg.
2.2. Fuzzy szabályok
A
fuzzy halmazok segítségével természetes
emberi nyelven könnyen tudunk szabályokat megfogalmazni.
Egy távfelügyeleti rendszerben, például,
mondhatunk egy olyan szabályt, hogy „Ha
a vételiszint-csökkenés
enyhe,
és az
eltelt idő rövid,
akkor gyenge
esőzés van”. Ha ezután definiáljuk az
enyhe, rövid és
gyenge tagsági
függvényeket, akkor fuzzy szabályt kapunk.
A szabály feltételrészből (antecedensből),
illetve következményrészből (konzekvensből) áll.
Több-bemenetű, egykimenetű fuzzy szabály általános,
ún. Mamdani-féle, alakja (Mamdani, −
Assilian, 1975): Ha
x1
= A1
és … és
xn
= An
akkor y
= B,
ahol x
= (x1,
…, xn)
a bemeneti értékek vektora, és minden xj
az Xj
komponenshalmaz eleme (például vételi szint,
időtartam) és X
az X1…Xn
együttes kezelésével létrejött
n-dimenziós alaphalmaz, A
= (A1,
…, An)
az antecedens halmazok vektora, A
az X
univerzum több dimenziós fuzzy részhalmaza, y
az Y
kimeneti változó alaphalmaz általános
eleme, B
a bemutatott szabály konzekvens halmaza.
2.3. Fuzzy
következtető rendszer
A
fuzzy halmazok elméletét felhasználhatjuk
bonyolult, analitikus módon nem modellezhető rendszerek
kezelhető leírására. Fuzzy szabályok
segítségével az emberi gondolkodáshoz
hasonlító funkciót ellátó
következtető rendszereket hozhatunk létre. A fuzzy
rendszerek elvi vázlata a 2.
ábrán látható.
Az illeszkedési mértéket meghatározó
egység a megfigyelést hasonlítja össze a
szabályok feltételrészeivel. Ennek alapján
a következtető gép meghatározza a kimeneti fuzzy
halmazt. Többféle következtetési módszer
ismert, gyakorlati alkalmazásokban legelterjedtebb a
Mamdani-módszer (Mamdani – Assilian, 1975), mely
úgy működik, hogy a megfigyelésekhez
meghatározzuk, hogy mennyire illeszkednek a szabályokra,
és ezen értékek alapján meghatározzuk,
hogy mely szabályok mennyire fontosak a végső
következtetés kialakításában. Minden
szabály kimenetét csak olyan mértékben
vesszük figyelembe a megfigyelésre adott következtetés
meghatározásánál, amennyi a szabály
illeszkedési értéke. Az e mértékekkel
módosított szabályok egyesítésével
megkapjuk a megfigyelésünkre adott fuzzy következtetést,
amelyből meghatározzuk azt a konkrét kimenetet, amely
legjobban jellemzi a következtető gép által
eredményezett fuzzy halmazt, azaz defuzzifikációt
hajtunk végre, például a súlypont alapú
(COG) módszerrel, melynek alkalmazása a
gyakorlatban a legelterjedtebb.
2.4 Hierarchikus
fuzzy rendszerek
Az
1990-es évek elejétől különböző
területeken vezettek sikerre a korábban alkalmazott
„hagyományos” fuzzy rendszerekhez képest
több hierarchikus szintbe strukturált újfajta
fuzzy modellek. Kiemelkedő ezek között Mícsió
Szugeno (Michio Sugeno) pilótanélküli helikopter
kísérlete, mely azóta tényleges
alkalmazásba is került (Sugeno et al., 1993). E
rendszerek közös jellemzője, hogy a szükséges
állapotváltozók száma viszonylag magas,
és a vizsgált rendszer viselkedése
értelemszerűen strukturálható, valamely
alapváltozók szerint lokális modellek
összességére bomlik, és e lokális
modellek külön-külön csökkentett számú
változót alkalmaznak. Minden lokális modellhez
egy alszabálybázis
tartozik. A felső, ún. metaszinten
először – a megfigyelés környezete vagy a
rendszer előírt reakciója alapján – a
megfelelő alszabálybázis kiválasztására
kerül sor. Ezt a lépést az ún.
metaszabályok
határozzák meg, amelyek bizonyos, a lokális
modelleket lényegében elkülönítő
változók értéke alapján, vagy
speciálisan a rendszer lokális működését
szabályozó változók értéke
alapján választják ki a megfelelő lokális
modellt. A metaszabályok hasonló szerkezetűek a fuzzy
szabályokhoz, de kimenetük konkrét szimbólum.
3.
A fuzzy logika alkalmazása
A
fuzzy logikát egy projekt keretében megvalósult
hálózatfelügyeleti rendszer egy moduljaként
alkalmaztuk (Kóczy − Veres, 2005). Olyan intelligens
döntéstámogatási rendszert hoztunk létre,
amelyet egy mobilhálózat felügyeletében
alkalmazunk. A rendszer csapadékjellemzőket határoz meg
adott területen, a felügyelt távközlési
hálózatban rendelkezésre álló
adási/vételi jelszintek alapján, a vételi
jelszint csökkenését és az eltelt időt
figyelve.
Az
alkalmazás adatokat fogad a bázisállomásokról,
amelyeket egy adatbázisban tárol a hozzájuk
tartozó időbélyeggel együtt. Periodikusan
körlekérdezést végez, és az új
adatok régiekkel való összevetéséből
meghatározza a jelszintváltozást, valamint
a hozzá tartozó időt, majd ezen információk
alapján következtetést hoz létre. A
következtetés egyik típusát az időjárással
kapcsolatos döntések jelentik, a másik esetben
valamilyen egyéb riasztás generálódik. Az
időjárási viszonyok ismerete több, a
távközlési felügyeleti rendszer működésében
bekövetkező változásra is magyarázatot
adhat. Ismert a csapadékmennyiség és a
jelszintváltozás összefüggése.
3.1. A fuzzy
szabályok meghatározása
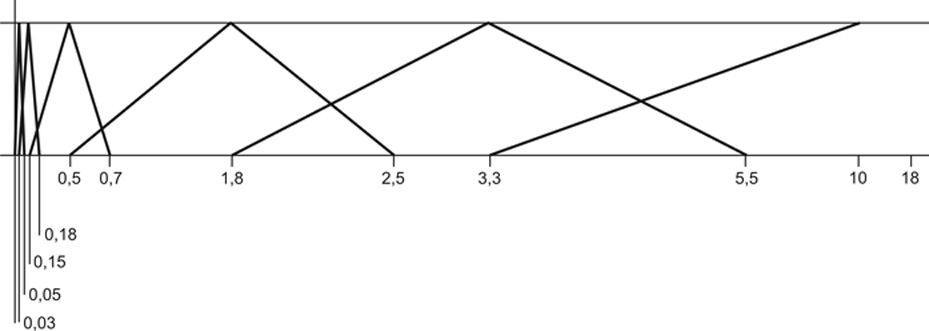
A
fuzzy szabályrendszer állomáspáronként
két bemeneti változót használ: a vételi
jelszintcsökkenést és az eltelt időt. A
jelszintcsökkenést hat kategóriába
soroljuk, nagyon enyhe (0–0,05 dB/km), enyhe (0,03–0,18
dB/km), mérsékelt (0,15–0,7 dB/km), számottevő
(0,5–2,5 dB/km), nagy (1,8–5,5 dB/km) és nagyon
nagy (3,3–18 dB/km). Az ezeket jellemző fuzzy halmazokat a 3.
ábrán szemléltetjük.
A fuzzy halmazok tartói részben átfednek, az
egyes jelszintcsökkenési osztályok között
nem éles a határ.
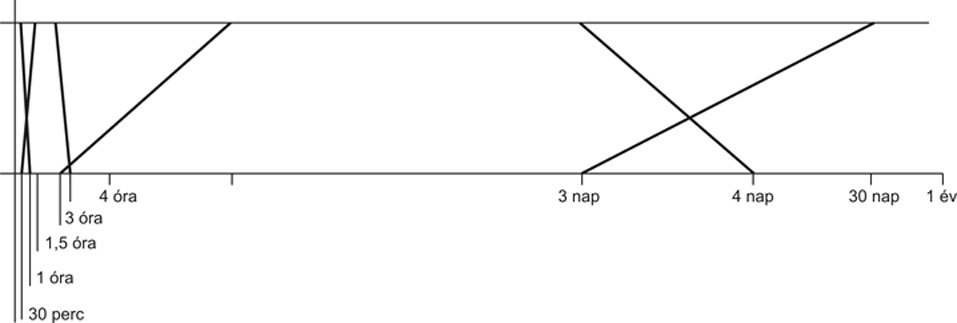
Az
eltelt időt négy kategóriába osztjuk: rövid
(0–1 óra), közepes (0,5–4 óra), hosszú
(3 óra–4 nap), nagyon hosszú (3 nap–1 év).
Az eltelt idő fuzzy halmazai a 4.
ábrán láthatók.
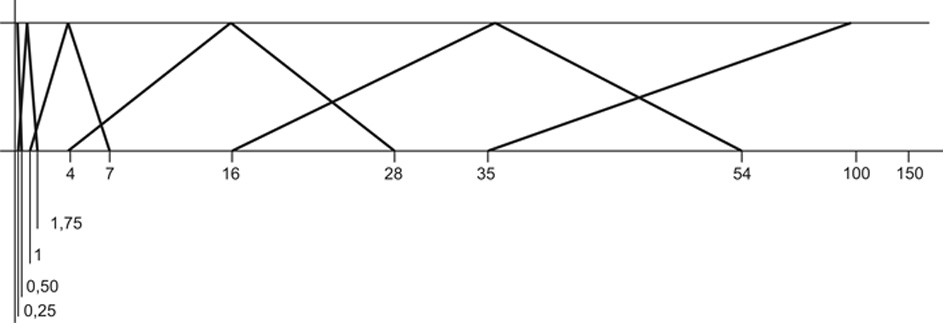
A
fuzzy rendszer kimenete a csapadékmennyiségeket
tartalmazza. Ezeket a következő kategóriákba
soroljuk: szitálás: 0–0,5 mm/óra, gyenge
esőzés: 0,25–1,75 mm/óra, közepes esőzés:
1–7 mm/óra, erős esőzés: 4–28 mm/óra,
záporeső: 16–54 mm/óra, felhőszakadás:
35–150 mm/óra, fuzzy halmazaikat a 5.
ábrán mutatjuk
be.
3.2. A fuzzy
szabályok
Fentiek
összefoglalására összesen 24 szabályt
állítottunk fel, melyekre példák az
alábbiak:
R1:
Ha nagyon enyhe a csökkenés és
az eltelt idő rövid,
akkor szitálás
R7:
Ha enyhe a csökkenés és az eltelt idő hosszú,
akkor gyenge esőzés
R11:
Ha mérsékelt a csökkenés és az
eltelt idő hosszú, akkor közepes esőzés
R17:
Ha nagy a csökkenés és az eltelt idő
rövid, akkor záporeső
R20:
Ha nagy a csökkenés és az eltelt idő
nagyon hosszú, akkor nagy riasztás
R21:
Ha nagyon nagy a csökkenés és az eltelt idő rövid,
akkor felhőszakadás
3.3. A következtetés
A következtetés
során először a szabályok illeszkedési
mértékét határozzuk meg az aktuális
megfigyelés és a szabályok antecedensrésze
alapján. A szabályok két csoportra oszthatók
a kimeneteik szerint. Amennyiben az illeszkedés mértéke
olyan szabály(ok) esetében a legnagyobb, amely(ek)
riasztás(oka)t tartalmaz(nak), akkor a fuzzy
rendszer a legnagyobb illeszkedési mértékű
riasztásos szabály szerinti következtetést
hoz. Amikor a csapadékra vonatkozó szabályok
illeszkedési mértéke nagyobb, akkor e
szabályok arányosan csonkolt konzekvens fuzzy
halmazainak unióján COG defuzzifikációt
hajtunk végre, vagyis a Mamdani-féle következtetést
alkalmazzuk.
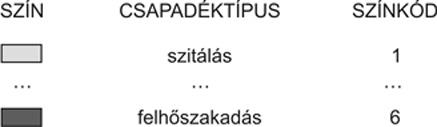
A
fuzzy rendszer által adott következtetést térképen
is megjeleníthetjük. A felrajzolt négyzetek színei
utalnak az esőzés mértékére. A színek
és az esőzés összerendelését
láthatjuk az 1.
táblázatban.
A
hat csapadékkategórián kívül a
riasztásokat is különböző árnyalatokkal
jellemezzük. A 6.
ábrán a
rendszer működését szemléltetjük
egy térképes kezelői felületi képpel,
melyet szimulált csapadék segítségével
állítottunk elő. Magyarország térképét
raszterhálózattal fedtük le, így
természetes, hierarchikus struktúrát adva a
teljes rendszernek. Olyan területeken, ahol egy raszterelemen
belül több állomás is található,
átlagos viselkedést számítunk és
jelenítünk meg; ahol egy raszterelem esetleg üresen
marad, interpolációval állítjuk elő
a csapadék becsült értékét. A sötét-
és világosszürke foltok szimulációs
adatok alapján a feltételezett
csapadékmennyiséget mutatják.
4.
Összefoglalás
E
cikkben áttekintettük a fuzzy rendszerek alapjait,
kitérve a hierarchikus fuzzy rendszerekre is, és
egy alkalmazási példát is bemutattunk
időjárási helyzet intelligens felismerésére.
E rendszerek jól használhatók döntéstámogató
eszközként olyan területeken, ahol az emberi tudás
fuzzy szabályok formájában reprezentálható.
További tervünk, hogy kiterjesszük az intelligens
döntéstámogató rendszert valódi
hierarchikus fuzzy szabálybázisokat használó
rendszerré. Laboratóriumi körülmények
között bemutattunk egy alkalmazást, amelyik egy
országos kiterjedésű mikrohullámú
hírközlő hálózat központi felügyeleti
rendszerében ciklikusan frissülő átviteli
állapot-adatbázis alapján lehetővé teszi
az időjárási eredetű riasztások automatikus
elkülönítését az átviteltechnikai
berendezések különböző típusú
meghibásodásaitól, valamint a hírközlő
hálózat teljes földrajzi kiterjedési
területén eső/köd intenzitástérkép
folyamatos identifikálását.
Kulcsszavak:
mobilhálózatok,
felügyeleti rendszerek, intelligens módszerek, fuzzy
logika
Irodalom
Kóczy
T. László − Tikk Domonkos (2000): Fuzzy
rendszerek.
Typotex, Budapest
Kóczy
T. László − Veres L. (2005): Üzemfelügyeleti
rendszer mesterséges intelligenciával.
Projekt zárójelentés. NKFP-2/0015/2002. BME
Távközlési és Médiainformatikai
Tanszék, 2005. szeptember.
Mamdani,
Ebrahim H. – Assilian, Seto (1975): An Experiment in
Linguistic Synthesis with a Fuzzy Logic Controller. International
Journal of Man-Machine Studies. 7,
1–13.
Sugeno,
Michio − Griffin, M. F. − Bastian, A. (1993):
Fuzzy Hierarchical Control
of an Unmanned Helicopter.
5th IFSA World Congress (IFSA’93), Seoul, 1262–1265.
- Zadeh,
Lotfi A. (1965): Fuzzy Sets. Information and Control. 8, 3, 338–353.
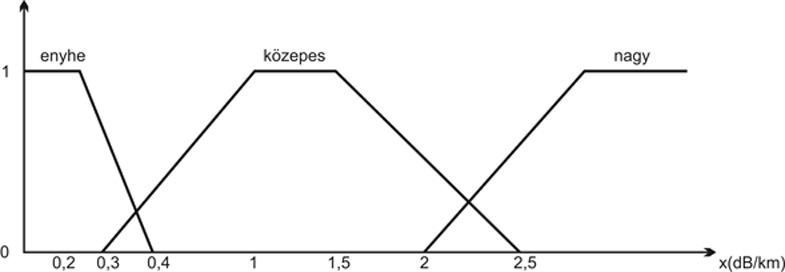
1.
ábra • Csillapítás mértékének
jellemzése fuzzy halmazokkal
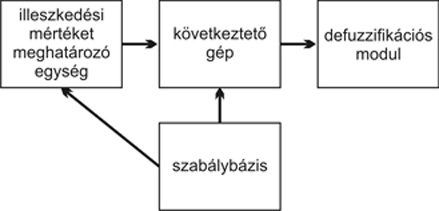 2.
ábra • Fuzzy következtető rendszer vázlata
2.
ábra • Fuzzy következtető rendszer vázlata
 3.
táblázat • Csapadéktípusok és
a hozzárendelt színek
3.
táblázat • Csapadéktípusok és
a hozzárendelt színek
 4.
ábra • A jelszint csökkenések fuzzy
halmazai (dB/km)
4.
ábra • A jelszint csökkenések fuzzy
halmazai (dB/km)
 5.
ábra • Az eltelt idő fuzzy halmazai
5.
ábra • Az eltelt idő fuzzy halmazai
 6.
ábra • A csapadékmennyiségek fuzzy
halmazai (mm/óra)
6.
ábra • A csapadékmennyiségek fuzzy
halmazai (mm/óra)
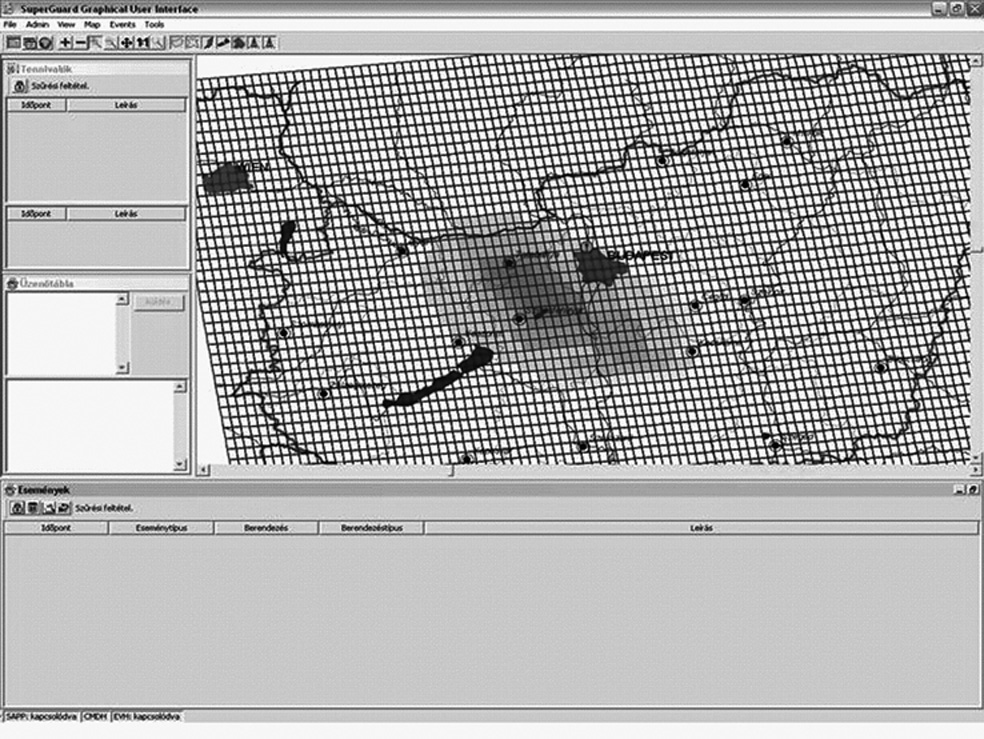 7.
ábra • Csapadékfelhő, egyidejű budapesti
hibajelzéssel
7.
ábra • Csapadékfelhő, egyidejű budapesti
hibajelzéssel
- <--
Vissza a 2007/07 szám tartalomjegyzékére
- <--
Vissza a Magyar Tudomány honlapra
- [Információk]
[Tartalom] [Akaprint
Kft.]