„Controllare” necesse est
– Szabályozni szükséges
Keviczky László
akadémikus, Számítástechnikai és Automatizálási Kutató Intézet
keviczky ![]() sztaki . hu
sztaki . hu
Bevezetés
Első nyilvános szereplésem az Akadémián, mint a legfiatalabb intézeti igazgató még mindig emlékezetes számomra. Végighallgatva pályatársaim és vezetőink gondjait, mint egykori latinos, hozzászólásomban felhasználtam a klasszikus idézetet: „Navigare necesse est”. Mindenki tegye a dolgát, kutatni kell, az eredményesség a részsikerek összessége, és vállaltam a rám eső részt. Mivel ezt akkor főtitkárunk később sokat idézte, ezért találtam ki a cím mesterséges idézetét, ami logikus jellemzése lehet az alábbiakban bemutatandó témának. (Sajnos az eredeti latin szókészletben nincs pontos megfelelő az angol „control”-ra, ezért az on-line etimológiai szótárakra támaszkodva vettem a bátorságot a „controllare” szó használatára, ami inkább az olasz utód nyelvből ered, de legalább érthető.) A cikket felkérésre írom és főleg azért vállaltam el, mert szakterületünkről még szinte semmi nem jelent meg a Magyar Tudományban. Mindenkihez szeretnék szólni, nem örülnék, ha bölcsész kollégáim továbblapoznának, talán számukra is fogok érdekességeket írni.
Valóban, mai megszokott kényelmes életünk szinte elképzelhetetlen az automatikusan működő készülékek, berendezések, folyamatok nélkül. Ez sokszor nem nyilvánvaló, hiszen mindenki ahhoz szokott, hogy „gombokat” nyomogat a korszerű vagy kevésbé korszerű eszközein, tehát kikapcsol, bekapcsol, beállít: az utasításait végrehajtó technológia láthatatlan, rejtett. Ezért nem is várható senkitől, hogy végiggondolja, hány szabályozási kör, vezérlési folyamat indul el, amikor egy rádió, televízió, video, DVD szórakoztató vagy kényelmi berendezés működik, vagy az olyan egyszerű rendszerek esetében, mint vasaló, melegvíztároló, vagy az egyedi gázfűtés. Az pedig még inkább a szakterületekre tartozik, hogy milyen belső szabályozási körök tartják életben az élőlényeket, szabályozzák a kereslet-kínálat viszonyát vagy éppen földünk globális környezeti folyamatait. A szórakoztatóipar eszközeiben néhány tucat, a repülőgépeken néhány száz, a nagyipari folyamatokban néhány ezer szabályozás működik állandóan napjainkban: biztosítva az elvárt szolgáltatást, minőséget vagy a környezetet nem veszélyeztető stabilitást.
Már egész fiatal korunkban megtanuljuk, hogy van olyan berendezés, ami nem működik szabályozás nélkül: ez a kétkerekű bicikli. Ha nem hajtunk és kormányozunk, akkor elesünk, ami az instabilitás közvetlen fájdalmas élményét szolgáltatja. Az ujjhegyen egyensúlyozott esernyő, pálca próbálkozásakor még senki nem gondol arra, hogy dinamikailag igen hasonló a probléma a repülőgépek levegőben tartásához, és ez a gondolat legközelebb már csak a felnőttkori utazásoknál jöhet elő ismét, különösképpen, ha félünk a repülőgépen (mint én). Nem sokan próbálkoztak két esernyőt, két pálcát egyensúlyozni egymáson, vagy egykerekű biciklit hajtani. Ezt csak a zsonglőrök, különleges képességű emberek tudják megtenni. Ez a képesség pedig már a repülő berendezések közül is a labilisabbak, a helikopterek irányításához kell. Az említett műszaki-technológiai feladatok megoldása ma már a szabályozástechnika hagyományos kurzusain elsajátítható és a számítógépek segítségével szinte rutinszerűen megoldható.
Alapfogalmak
Szakterületünket röviden leginkább rendszer- és irányításelméletnek (-technikának) nevezik szerte a világban. Vulgárisabb elnevezés az automatizálás, ami sokkal jobban érthetőbb, de jelentése jóval korlátozottabb, mint az előző meghatározás. A továbbiakban, bár többnyire műszaki rendszerek irányítási folyamatait tárgyaljuk, törekedni fogunk arra, hogy a leírtakat minden tudományterület képviselője megértse. Az ipari termelési folyamatok irányításának lényeges szerepe van a jobb termékminőség biztosításában, az energiafelhasználás minimalizálásában, a biztonság növelésében, a környezetszennyezés csökkentésében.
Az anyagi javakat előállító termelési folyamatokban anyag- és energiaátalakítási folyamatok mennek végbe. Irányítással biztosítani kell e folyamatok megfelelő elindítását, fenntartását, leállítását. Egy hőerőműben például a szén kémiai energiája az elégetéskor hőenergiává alakul át. A hőt gőz előállítására használják fel. A gőz meghajtja a gőzturbinát, mechanikai forgási energia jön létre. A turbina forgatja a szinkrongenerátor forgórészét az állórész mágneses terében. Ezáltal villamos energia jön létre. Ezeket a folyamatokat előírt mederben kell tartani. A folyamatokat el kell indítani, működésüket megadott előírásoknak megfelelően kell fenntartani. Az energiatermelési folyamatnál biztosítani kell például, hogy a változó napi terhelés ellenére a villamos energia előírt feszültségen és frekvencián előírt pontossággal álljon rendelkezésre. A folyamatok leállítását is biztonságosan kell végrehajtani.
A folyamatok kívánt fenntartása különböző fizikai mennyiségek állandó értéken tartását vagy adott törvényszerűség szerinti megváltoztatását jelenti. Ilyen fizikai mennyiségek lehetnek például egy közeg hőmérséklete, nyomása, egy anyag összetétele, egy gép fordulatszáma, egy tengely szöghelyzete, egy tartály folyadékszintje stb. Az irányítás olyan művelet, amely valamely folyamatba annak elindítása, fenntartása, megfelelő lefolyásának biztosítása, megváltoztatása vagy megállítása végett beavatkozik.
Az irányítás alapja a folyamatról, illetve környezetéről való információszerzés, megfigyelés, érzékelés, mérés útján. A különböző fizikai mennyiségek méréséhez mérőműszerekre van szükség. Az irányítási cél ismeretében és a folyamatról, illetve környezetéről szerzett információ alapján döntést hozunk a folyamatba történő megfelelő beavatkozásra. Az irányítás műveletére jellemző, hogy nagy energiájú folyamatokat rendszerint kis energiájú hatásokkal befolyásol. Az irányítástechnika az irányítási rendszerek törvényszerűségeivel, az irányítási műveletek vizsgálati módszereivel, az irányítási rendszerek tervezésével, megvalósításával foglalkozik.
Az irányítási folyamat a következő műveletekből áll (1. ábra).
Érzékelés: információszerzés az irányítandó folyamatról és környezetéről • Ítéletalkotás: az értesülés feldolgozása és az irányítási cél alapján döntéshozás a rendelkezés szükségességéről: szabályozó algoritmus • Rendelkezés: utasítás a beavatkozásra, parancs kiadása: az irányított folyamat befolyásolása a rendelkezés alapján.
Ha az információt nem közvetlenül az irányított jellemző érzékelésével nyerjük, vezérlésről vagy nyílt hurkú irányításról beszélünk. Vezérlésre példa a mosógép időprogram szerinti irányítása az egymást követő műveletek (öblítés, mosás, centrifugálás) elvégzésére. A kimenőjelet (a ruhák tisztaságát) nem mérjük. Ha egy terem fűtését a külső hőmérséklet értékétől függetlenül állítjuk, ugyancsak vezérlésről van szó.
Ha az információt az irányított jellemző mérésével kapjuk, szabályozásról vagy visszacsatolt zárt hurkú irányításról van szó. A 2. ábra egy szabályozási kör működési vázlatát adja meg. A szabályozás alapja a negatív visz-szacsatolás (feedback), a rendelkezés az alapjel és a visszacsatolt érzékelt szabályozott jellemző értékének összehasonlítása révén jön létre. (A szabályozás általános problematikájának többféle sémája létezik, de mindegyik lényege a visszacsatolás.) Megjegyezzük, hogy a negatív visszacsatolás számos szakmában ismert a kognitív pszichológiától, a tanulási felismerési folyamatokon keresztül alapvető orvos-biológiai, környezeti és fiziko-kémiai rendszerekig.
A vezérlés és a szabályozás összehasonlítása
Ha a beavatkozójel és az irányított jellemző közötti kapcsolat pontosan ismert és az irányítási hatáslánc valamennyi eleméről és a zavaró jellemzőkről megbízható információk állnak rendelkezésre, a vezérlés jó irányítást biztosíthat. Ha azonban ismereteink a rendszerről és a zavarásokról pontatlanok, a vezérlés működése nem lesz kielégítő. A vezérlés olcsó irányítási lehetőséget biztosít, mivel nem alkalmaz költséges érzékelő berendezéseket az irányítandó mennyiség mérésére, hanem előzetes ismereteket vagy külső mennyiségekről kapott információt használ fel az ítéletalkotáshoz. Vezérléskor nem lépnek fel stabilitási problémák.
A zárt hurkú szabályozás költségesebb, mint a vezérlés. Az irányított jellemzőt érzékelő műszerrel mérjük, és a beavatkozás az alapjel és az érzékelt kimenőjel eltérése alapján történik. A szabályozás képes az alapjel követésére és a zavarások elhárítására. Mivel a szabályozott jellemző értékét befolyásolják a zavarások, a szabályozás elhárítja az előre nem ismert zavarások hatását, és kompenzálja a folyamat modelljének pontatlanságából eredő paraméter-bizonytalanságok hatását is. A szabályozás működésbe lép a kimenőjelnek a kívánt értéktől való eltérésének kiküszöbölésére, akármilyen hatás okozta is az eltérést. A negatív visszacsatolás következtében azonban stabilitási problémák léphetnek fel, a rendszerben nemkívánatos lengések jöhetnek létre. A rendszer stabilitása a szabályozó megfelelő tervezésével biztosítható.
Egy kis történelem
A negatív visszacsatolás alkalmazása nem új elv, már az ókori görögök is alkalmazták. Visz-szatekintve a szabályozástechnika fejlődésének történetére, néhány tendenciát figyelhetünk meg. A negatív visszacsatolás alkalmazása mérnöki feladatok megoldásához kapcsolódik. A szabályozástechnika fejlődése szorosan kötődik azokhoz a gyakorlati feladatokhoz, amelyek az emberiség történetének egy-egy szakaszában megoldásra vártak. A történelem egyes korszakai, amelyek jelentős befolyással voltak a szabályozástechnika fejlődésére:
• az ókori görög és arab kultúra (ie. ~300 – ~1200),
• az ipari forradalom kora (1700-as évek, de a kezdetek már 1600 körül),
• a távközlés kezdetei (1910-1945),
• a számítógép megjelenése, az űrkutatás kezdete (1957–),
• az irányítás-, számítástechnika és kommunikáció összeolvadása, magas szintű intelligencia megjelenése a döntésekben (2000–)
E korszakokat tekintve megállapíthatjuk, hogy az ember először a helyét kereste térben és időben, majd igyekezett környezetét alakítani és életét kényelmesebbé tenni, ehhez hozzájárult az ipari termelés. Ezután a kommunikációt is felhasználva megalapozza helyét, helyzetét a társadalomban, majd igyekszik kapcsolatot teremteni a világmindenséggel.
Már az ókori görögök is használtak különböző automatákat. Az egyik első szabályozási rendszer az alexandriai Ktészibiosz vízórája volt (i.e. 270). A szerkezet úszót használt egy tartály szintjének érzékelésére és állandó értéken tartására. Ha a tartályban a víz szintje csökkent, egy szelep nyitott, és a tartály újratöltődött. Az állandó szint biztosította a tartályból kifolyó víz mennyiségének állandó értékét. A kifolyó víz egy második tartályt töltött. Ez a tartály az idővel arányosan töltődött. A bizánci Philón (i.e. 250) szintén úszós szabályozót használt egy olajlámpa olajszintjének szabályozására. Az alexandriai Hérón (Kr. u. 1. sz.) is hasonló szerkezeteket alkalmazott szintszabályozásra, boradagolásra, templomajtók nyitására, stb.
Az arab mérnökök 800 és 1200 között számos úszós szabályozószerkezetet használtak. Feltalálták az állásos – ki/be kapcsolással működő – szabályozásokat is.
A mechanikai óraszerkezetek feltalálásával az úszós vízórák elfelejtődtek. A szabályozás elve az ipari forradalom idején talált újabb alkalmazásokra.
Az ipari forradalom korában számos önműködő berendezést találtak fel; ezekben automatikus szint-, hőmérséklet-, nyomás- és sebességszabályozási feladatokat oldottak meg. Már az 1600-as évektől kezdődően voltak különböző szabályozási alkalmazások (szélmalmok fordulatszám-szabályozása, kemencék hőfokszabályozása [Cornelis Drebbel], nyomásszabályozás [Papin] stb.). Az ipari forradalom kezdetét a gőzgép feltalálása jelzi (Savery és Newcomen, ~1700). Az első ipari szabályozásnak James Watt centrifugálszabályozója tekinthető, amelyet a gőzgép fordulatszám-szabályozására alkalmazott (3. ábra). A centrifugálérzékelő helyzete a gőzgép fordulatszámától függ. Az érzékelő a mozgató emelőkaron keresztül állítja a gőzdugattyú helyzetét, befolyásolva a gőzgépbe beáramló gőz mennyiségét és ezáltal a gőzgép fordulatszámát. (Érdekességként megemlítjük, hogy még közel száz év telt el, mire Maxwell megadta a rendszert pontosan leíró differenciálegyenletek rendszerét.)
Az ipari forradalom után a szabályozástechnika fejlődésében lényeges előrelépést jelentett a szabályozási körök matematikai leírási módszereinek megadása, ami lehetővé tette a szabályozási rendszerek viselkedésének szigorúbb és pontosabb vizsgálatát.
A szabályozástechnika újabb fejezete kezdődött a telefon feltalálásával, és a visszacsatolt műveleti erősítők alkalmazásával az információ továbbításakor fellépő csillapítás kompenzálására. A második világháború idején számos precíziós szabályozási rendszert dolgoztak ki, automata repülésirányítási rendszereket, radarantenna-beállító rendszereket, tengeralattjárók irányító berendezéseit stb. Ezek a technikák azután később az ipari termelésben is alkalmazást nyertek.
A számítógépek elterjedése új korszakot nyitott a szabályozási rendszerek fejlődésében. A számítógép nemcsak mint külső eszköz jelenik meg, amellyel a tervezés körültekintőbben és könnyebben elvégezhető, hanem valós idejű alkalmazásokban a szabályozási kör részét képezi. A folyamat és az azt irányító számítógép perifériákon keresztül kapcsolódnak egymáshoz, és szoftveres úton minden mintavételezési időpontban kiszámított beavatkozó jel kerül a folyamat bemenetére. A számítógép tehát a szabályozási kör szerves része. Megjelentek az ilyen szintű működést biztosító hardver- és szoftverelemek.
A folytonos szabályozási rendszerek mellett egyre nagyobb teret nyertek a számítógépes folyamatirányítási rendszerek, ilyenkor a folyamat és a folyamatirányító számítógép A/D és D/A (analóg/digitál, digitál/analóg) átalakítókon keresztül kapcsolódik egymáshoz. A szabályozás lényeges funkcióit a számítógép végzi valós időben, mintavételi időközönként megismételve. Ipari folyamatirányításokban elosztott irányítási rendszereket hoztak létre, ahol a térben elosztott irányítási rendszerek egymással kommunikálva összehangoltan működnek.
 A legkorszerűbb repülőgépeken (pl. Airbus
sorozat) többségében már
nemcsak (elektro)mechanikus szerkezetek
továbbítják a pilóta (robotpilóta)
parancsait, hanem redundáns, többszörös
működésű számítógépes
hálózatok (fly-by-wire).
Ez az átalakulási folyamat lassan
megjelenik a legmodernebb autókban is. Az autópályákon
való közlekedés automatizálása pedig
napjaink részeredményeiben már látható
érdekes feladata.
A legkorszerűbb repülőgépeken (pl. Airbus
sorozat) többségében már
nemcsak (elektro)mechanikus szerkezetek
továbbítják a pilóta (robotpilóta)
parancsait, hanem redundáns, többszörös
működésű számítógépes
hálózatok (fly-by-wire).
Ez az átalakulási folyamat lassan
megjelenik a legmodernebb autókban is. Az autópályákon
való közlekedés automatizálása pedig
napjaink részeredményeiben már látható
érdekes feladata.
Megjelentek a precíziós feladatokat végző ipari robotok. A robot egy számítógép által vezérelt automatizált gép. A robotokban sokszor emberi tulajdonságokat utánoznak, pl. robotmanipulátoroknál a kéz mozgását képezik le. A mozgó robotokat bizonyos intelligenciával igyekeznek felruházni, mint pl. a térben való mozgáskor az akadályok felismerése és elkerülése.
Az űrkutatás újabb kihívást jelent a szabályozási rendszerekkel szemben. Az űrrepülőgépek, mesterséges űrobjektumok pályára állítása, célba juttatása igen pontos, a körülményekhez alkalmazkodni tudó, tanuló szabályozási rendszereket igényel, amelyeknél rendkívül fontos a biztonságos működés.
A szabályozáselmélet a szabályozási rendszerek felépítésével, analízisével és szintézisével foglalkozik. A szabályozáselmélet klasszikus korszaka (~1960-ig) megadta a negatív visszacsatoláson alapuló szabályozások működésének, analízisének és szintézisének alapelveit.
A szabályozáselmélet modern korszaka (~1960-1980) az irányítási rendszerek állapotváltozós leírására és az ezen alapuló tervezési módszerekre fektetett hangsúlyt.
Az 1970-80-as években olyan tanuló, paraméteradaptív irányításokat igyekeztek kifejleszteni, amelyek változó körülmények között is mindig optimálisan látják el feladatukat. Ez az időszak nagy lökést adott a folyamat-modellek identifikációs, becslési eljárásainak.
Az utolsó évtizedben a robusztus, a paraméterváltozásokra kevésbé érzékeny, megbízható szabályozások tervezése került előtérbe. A nemlineáris rendszerek irányítása, a környezet változásait felismerő, azokhoz alkalmazkodó intelligens, tanuló rendszerek, a hálózati összekapcsolást messzemenően felhasználó irányítási rendszerek alkalmazása újabb távlatokat nyit a szabályozástechnikában.
A szabályozástechnika napjainkban is dinamikusan fejlődik. Az újabb eszközök és technikák újabb elméleti kérdéseket vetnek fel, és újszerű alkalmazásokat tesznek lehetővé. A korszerű érzékelők (nagypontosságú kamerák, mikroszkópok, a legkülönbözőbb anyagtulajdonságok, mint összetétel vagy mozgásparaméterek, mint sebesség, gyorsulás, helyzet, stb.) elérhetővé válásával, vagy ezek kombinálásával (érzékelő tömbök, array detectors) a hagyományos irányítási feladatok fölé települő intelligens döntések lehetősége mindennapunk gyakorlatává vált. A marsjáró robot automatikája nem képzelhető el magas szintű intelligencia nélkül: érzékeli helyzetét, környezetét, lehetőségeit, és küldetésének keretei között maga oldja meg az irányítás feladatát.
Interdiszciplináris megközelítés
Az irányítástechnika interdiszciplináris tudományterület. A folyamat működését meg kell érteni, ehhez fizikai, kémiai, biológiai stb. ismeretekre van szükség. Matematikai ismeretekre van szükség a modellezéshez, az analízishez és a szintézishez. A szabályozási kör vizsgálatához ismeretekre van szükség a jelekről, rendszerekről, a negatívan visszacsatolt rendszerek viselkedéséről. A tervezés során józan megfontolásokat és alapvető korlátozásokat is figyelembe kell venni. A tervezésnek ki kell terjednie a gazdaságossági, biztonsági, környezetvédelmi stb. szempontokra is. Egy bonyolultabb irányítási feladat megoldásához sokszor különböző szakemberek összehangolt munkájára van szükség. Mivel a gyakorlati realizáció egyre többször digitális számítógépen történik, ezért az informatikus szakember szerepe döntő.
Az interdiszciplináris jelleg alatt értjük azt is, hogy számos tudományterület használja az irányításelmélet fogalmait és tudja magyarázni létfontosságú jelenségeit. Az emberi szervezet vérnyomás-, vércukor-, bizonyos hormon-háztartási jellemzőinek a szabályozása bonyolult többváltozós szabályozási kérdéskör, amit legalább olyan nehéz beállítani, mint egy műszaki rendszerben. Ki gondolná, hogy egy logisztikai raktárirányítás, a piac kereslet-kínálat szabályozása és egy tartály szintszabályozása teljesen hasonló analóg probléma?
Az irányításelmélettel kéz a kézben haladó rendszerelmélet gondolkodási módja, mely szerint folyamataink dinamikusak, azoknak bemenőjelei, kimenőjelei és belső állapotváltozói vannak, nagyon jó sorvezetőt és alapvetően racionális megközelítést és módszertant nyújtanak számos tudományterületnek.
A szabályozás korlátai
Az optimista kép ellenére sajnos nem tudunk mindent megoldani a szabályozástechnika segítségével. Az irányítandó folyamat igen sokszor lomha, tehetetlen, dinamikailag lassú, amit fel szeretnénk gyorsítani. Erre csak az ad lehetőséget, hogy a parancsok teljesítésekor rövidebb-hosszabb időre extra energiát (túlvezérlést) kell a folyamatba bejuttatni a zárt szabályozási kör szerint számított mértékben. Ennek azonban rendszerint technikai akadálya van. Ha valaki már látta a Barátság kőolajvezeték óriási elzárószelepét, az mindjárt megérti, hogy ezt nem lehet néhány másodperc alatt elzárni vagy ki-be kapcsolgatni. Ez egy végletes példa, de nem kell nagy fantázia ahhoz, hogy a feladat jellegétől függően, a beavatkozást végző berendezés függvényében az említett extra energia bevitele nem lehet akármekkora. Gyakorlatilag ez a korlát meghatározza, hogy milyen gyorsítást tudunk a folyamaton elvégezni. A harci repülőgépek fordulékonyságát pedig rendszerint nem technikai korlátok, hanem az emberi szervezet tudatvesztés nélkül elviselni képes „g-terhelése” határozza meg.
A megoldás bizonyos esetekben nem tőlünk, hanem a folyamattól függ, amit irányítani akarunk. Érdekes módon nem az önmagában labilis folyamatok (lásd az egyensúlyozott pálca, szaknyelven fordított inga) stabilizálása, megfelelő szabályozása az igazi probléma, mert a stabilizálás rutinfeladat. A folyamat más dinamikai tulajdonságai viszont alapvető fontosságúak és megváltoztathatatlanok: ezeket invariáns tulajdonságoknak nevezzük és elméletileg sem várható, hogy hatásukat kiküszöbölhessük. Ezek közül bemutatunk kettőt.
Az egyik alapvető invariáns tulajdonság az ún. tiszta késleltetés vagy holtidő, amely adódhat a technológia szállítási idejéből, a mért jel terjedési sebességéből vagy pedig egy bonyolult mérés kiértékelési idejéből. A holtidő invariáns folyamattulajdonság, amit nem tudunk kikompenzálni, csak hatását csökkenteni vagyunk képesek. Itt az alapvető probléma, hogy a folyamat a parancsra (utasításra) a holtidő alatt (innét adódik az elnevezés) semmilyen választ nem mutat (lásd a 4. ábrát), a szabályozás helyes működésekor meg kell várnunk, amíg az első válasz megjelenik, tehát le kell lassítanunk és óvatosabbá kell tennünk a zárt rendszerünket. Ezt is mindenki tapasztalta már, ha zuhanyozáskor a melegvizes csap elég messze van a zuhanyrózsától, hiszen óvatos csavargatással tudjuk csak beállítani a kívánt hőmérsékletet. Számos holtidős folyamatot ismerünk, és kajánkodva megemlítem, hogy a felsőoktatás is az: a képzési idő függvényében néhány év múlva látjuk csak meg az eredményt, ezért a rendszer- és szabályozástechnikus általában menekül a lángoló szemű reformerektől, akik évente szeretnének reformot végrehajtani, mert tudják, hogy ez a legbiztosabb módja a labilitás („káosz?”) bevezetésének. Első szabályozástechnika-professzorom, az Akadémia akkori alelnöke, Csáki Frigyes lemondott a rektorságról, amikor olyan „reformot” akartak rákényszeríteni, ami szöges ellentétben volt a fenti ismereteivel. De említhetném az állattenyésztést is, ahol a vemhességi idő jónéhány hónapban mérhető, nem kérdéses, hogy az eredményt csak ezután láthatjuk, mégis előfordult számtalan alkalommal havi, negyedéves ösztönzési stratégia, ami szintén ellentmond az elméletnek. A frekvenciafogalomban jártas tudományágak számára azt mondhatjuk, hogy a holtidőnek megfelelő frekvenciánál magasabb tartományokban a szabályozás nem tud működni! A szabályozás minősége nem tőlünk, hanem a folyamattól függ. A szabályozó algoritmus meghatározása alapos szakértelmet igényel.
 A holtidő nagymértékű megnövekedése végül
lehetetlenné teszi a közvetlen zárt
szabályozási kör alkalmazását.
Ez a helyzet például egy marsjáró robot
esetében, ahol a távirányítás
gyakorlatilag már nem alkalmazható. (A Hold esetében
bizonyos minőségromlás elviselésével
ez még elképzelhető, lásd a vonatkozó
történelmi lépéseket.) Ilyenkor nincs más
mód, mint lényegesen magasabb intelligenciával
kell az önműködő berendezést ellátni és
helyi döntésre bízni a szabályozást.
A holtidő nagymértékű megnövekedése végül
lehetetlenné teszi a közvetlen zárt
szabályozási kör alkalmazását.
Ez a helyzet például egy marsjáró robot
esetében, ahol a távirányítás
gyakorlatilag már nem alkalmazható. (A Hold esetében
bizonyos minőségromlás elviselésével
ez még elképzelhető, lásd a vonatkozó
történelmi lépéseket.) Ilyenkor nincs más
mód, mint lényegesen magasabb intelligenciával
kell az önműködő berendezést ellátni és
helyi döntésre bízni a szabályozást.
A folyamatok egy másik osztályát nem-minimumfázisú folyamatoknak hívjuk, s ezek szintén fontos invariáns tulajdonságokkal rendelkeznek. Ezt a bonyolult nevet nagyon könnyen tudjuk szemléltetni, ha ábrázoljuk egy ilyen folyamat válaszát egy ugrásalakú parancsra.
Ez viccesen egy illetlen, gonosz viselkedés, mert a folyamat válasza elindul egy irányba (nem az utasítás által megkövetelt irányba!), majd meggondolja magát és a változás irányát megváltoztatva a másik irányban éri el állandósult állapotát (5. ábra). Ha a beavatkozó ember vagy az automatikus berendezés nem elég „türelmes”, akkor a beavatkozásának katasztrofális hatása lehet: a labilitás. (Sajnos ez volt az egyik tényező Csernobil esetében, ahol a változás időállandója, dinamikája elég lassú volt ahhoz, hogy kikapcsolt automatika esetében a kísérletező embert tökéletesen megzavarja.) Érezhető a hasonlóság a holtidős folyamatok problémájához, mert itt is meg kell várni azt az időt, amíg eldönthetjük, hogy eltelt-e már a tranziens folyamat zavaró különleges viselkedésű kezdeti szakasza. (Holtidős folyamatokat nem-minimumfázisú folyamatok modelljével szokták közelíteni. Az elektronikában járatos szakemberek jól ismerik a mindent áteresztő szűrőket, amelyek szintén ebbe a modellosztályba tartoznak.) Létező technológiáinkban nem mondhatjuk, hogy ezen típusú folyamatok vannak többségben, de számuk nem elhanyagolható (durva becslés szerint talán kevesebb, mint 10 %), és itt is a szabályozás minősége nem tőlünk, a tervezőtől, a szakembertől függ, hanem a folyamattól. A szabályozó meghatározása itt a nehéz feladatok közé tartozik
Lelkesen szoktuk emlegetni, hogy a digitális számítógépek elterjedésével az úgynevezett alkalmazási küszöbszint olyan mértékben csökkent, hogy alig-alig létezik olyan irányítási algoritmus, amelyet ne tudnánk megvalósítani. Ezek az ún. mintavételes rendszerek a valóságban folytonos idejű folyamatokat diszkrét idejű modellekkel helyettesítik. Az ilyen modelleknél viszont megfordul a helyzet, mert többségük nem-minimumfázisú tulajdonságokkal rendelkezik (durva becslés: több mint 90 %). Ezért a számítógépes irányítás szabályozóinak tervezéséhez is az elmélet igen alapos ismerete szükséges.
Érdemes megemlíteni, hogy az optimális szabályozók valamilyen formában mindig a folyamat dinamikus viselkedésének az inverzét próbálják alkalmazni. Sajnos az említett holtidős és nem-minimumfázisú folyamatok inverze nem realizálható, illetve labilis. Érdekes matematikai probléma, a legközelebbi inverz megkeresése adja az optimális szabályozót a megvalósíthatóság határai között.
Összetett problémák
 A fenti problémák természetesen fokozottan
jelentkeznek, ha az irányítás nem egy, hanem
több változó szabályozását
tűzi ki célul (többváltozós rendszerek).
Egy népszerűsítő cikk keretében nem is nagyon
van mód szemléltetni ezt a hihetetlen ugrást,
ami a probléma dimenziójának és a
tervezés paramétereinek megnövekedésével
következik be. Itt csak arra utalunk, hogy néhány
tucat bevatkozó lehetőség és ugyanennyi
szabályozandó változó esetében
emberi képességekkel még azt sem tudnánk
eldönteni, hogy adott beavatkozással egy előírt
tulajdonság befolyásolható-e. Nagyipari
folyamatoknál, például olajfinomítóban
a szabályozásba bevont változók száma
több száz is lehet. E vizsgálat megalapozásában
a magyar származású Kálmán
Rudolf, Akadémiánk tiszteleti tagja,
alapvető és úttörő tevékenységet
végzett az irányíthatóság és
megfigyelhetőség elméletének kidolgozásával.
Itt az eddigi skalár változók szerepét
vektorok, a paraméterekét pedig mátrixok veszik
át. Még lineáris rendszerek esetében sem
lehetséges mély matematikai ismeretek nélkül
tárgyalni a különböző többváltozós
folyamat modellek és a lehetséges irányítási
megoldások származtatását, kidolgozását.
A fenti problémák természetesen fokozottan
jelentkeznek, ha az irányítás nem egy, hanem
több változó szabályozását
tűzi ki célul (többváltozós rendszerek).
Egy népszerűsítő cikk keretében nem is nagyon
van mód szemléltetni ezt a hihetetlen ugrást,
ami a probléma dimenziójának és a
tervezés paramétereinek megnövekedésével
következik be. Itt csak arra utalunk, hogy néhány
tucat bevatkozó lehetőség és ugyanennyi
szabályozandó változó esetében
emberi képességekkel még azt sem tudnánk
eldönteni, hogy adott beavatkozással egy előírt
tulajdonság befolyásolható-e. Nagyipari
folyamatoknál, például olajfinomítóban
a szabályozásba bevont változók száma
több száz is lehet. E vizsgálat megalapozásában
a magyar származású Kálmán
Rudolf, Akadémiánk tiszteleti tagja,
alapvető és úttörő tevékenységet
végzett az irányíthatóság és
megfigyelhetőség elméletének kidolgozásával.
Itt az eddigi skalár változók szerepét
vektorok, a paraméterekét pedig mátrixok veszik
át. Még lineáris rendszerek esetében sem
lehetséges mély matematikai ismeretek nélkül
tárgyalni a különböző többváltozós
folyamat modellek és a lehetséges irányítási
megoldások származtatását, kidolgozását.
 Nem volt célszerű eddig emlegetni, hogy a röviden
áttekintett megoldások a folyamatok lineáris
közelítését használják a
szabályozók tervezésében, a valóságos
rendszerek viszont általában bonyolult nemlineáris
tulajdonságokkal rendelkeznek, így az eddigiek mindig
csak egy adott tartományban használhatóak, ahol
a lineáris közelítés elfogadható. A
nemlineáris rendszerek sokfélesége miatt
nem könnyű általános elméletet alkotni,
de ez a terület is egyre több valódi alkalmazásig
jutott el. Akinek autója benzinadagolását a
fedélzeti számítógép
irányítja, az biztos lehet benne, hogy valódi
nemlineáris szabályozó oldja meg az igen
hasznos és nélkülözhetetlen
feladatot. A szükséges üzemanyag mennyisége
ugyanis olyan bonyolult nemlineáris felületen keresztül
függ az üzemi paraméterektől, amit gyakorlatilag nem
lehet és nem érdemes linearizálni. Nemlineáris
rendszerek modelljei és irányítási
algoritmusai szintén magas szintű matematikai ismereteket
igényelnek.
Nem volt célszerű eddig emlegetni, hogy a röviden
áttekintett megoldások a folyamatok lineáris
közelítését használják a
szabályozók tervezésében, a valóságos
rendszerek viszont általában bonyolult nemlineáris
tulajdonságokkal rendelkeznek, így az eddigiek mindig
csak egy adott tartományban használhatóak, ahol
a lineáris közelítés elfogadható. A
nemlineáris rendszerek sokfélesége miatt
nem könnyű általános elméletet alkotni,
de ez a terület is egyre több valódi alkalmazásig
jutott el. Akinek autója benzinadagolását a
fedélzeti számítógép
irányítja, az biztos lehet benne, hogy valódi
nemlineáris szabályozó oldja meg az igen
hasznos és nélkülözhetetlen
feladatot. A szükséges üzemanyag mennyisége
ugyanis olyan bonyolult nemlineáris felületen keresztül
függ az üzemi paraméterektől, amit gyakorlatilag nem
lehet és nem érdemes linearizálni. Nemlineáris
rendszerek modelljei és irányítási
algoritmusai szintén magas szintű matematikai ismereteket
igényelnek.
A szabályozók tervezése általában megköveteli a folyamat egy elfogadható pontosságú modelljének az ismeretét. Ezt a modellt sokféleképpen megkaphatjuk, és elképzelhető olyan módszer is, amely a folyamat be- és kimenőjelét figyelve mindig kiszámít (becsül, identifikál stb.) egy modellt, amelyet a soron következő szabályozástervezési lépés felhasznál. Ily módon ún. tanuló, adaptív irányítást hozhatunk létre. A téma nagyon divatos volt az 1970-es és 80-as években, majd bekövetkezett néhány alapvető felismerés. Antagonisztikus ellentmondás van a tanulás információigénye (azt kívánja, hogy a szabályozási kör jelei minél erőteljesebben változzanak) és a szabályozás szokásos követelményei (gyors tranziens folyamatok után nyugodt viselkedés, nem változó jelek) között. A tanuló szabályozásnak az lenne az igazi célja, ha a folyamat paraméterei folyamatosan változnak, akkor ezen változás megtanulásával mindig az optimális szabályozót tudnánk realizálni. Itt egy következő antagonisztikus ellentmondás. Ha tanulni akarjuk az új paramétereket, akkor bizony a régieket el kell felejteni. Ezt a tulajdonságot a felejtési képességek hangolásával lehet biztosítani. Ha túl gyorsan felejtünk, akkor gyors paraméterváltozást is meg tud az algoritmus tanulni, de a kockázat nagy: ha nem jön új információ, akkor elfelejti a megtanult modellt, és a tervezett szabályozó használhatatlan lesz. Ha túl lassan felejtünk, akkor pedig nem tudja követni a folyamat változásait az adaptív modell. Ezért a tanuló algoritmust úgy kell elkészíteni, hogy csak új információ esetében felejtsen, ha ez nincs, akkor őrizze meg eddigi tudását. A szavakban elmondott képességeket borzasztóan nehéz biztosítani egy matematikailag is megalapozott módszerrel. Ezeket az ellentmondásos követelményeket, valamint igen igényes elméleti hátteret az ipari gyakorlat nem tudta teljesen befogadni: „Nem tudunk minden adaptív szabályozó mellé egy táltost állítani, aki szükség esetén megmondja, hogy mi a probléma” – vélekedtek. Végezetül bizonyos technológiáknál azért kialakult az ipari alkalmazhatóság feltétele is. Ezek az úgynevezett önbeállító kompakt szabályozók, amelyeken megnyomunk egy gombot, ezután a folyamat előírt gerjesztését létrehozva lezajlik egy tanulási folyamat, és a szabályozó beállítja saját optimális paramétereit. Szó sincs folyamatos tanuló, adaptív szabályozásról, mert erre az önhangolásra rendszerint csak ritkán van szükség.
Érdemes még szólnunk az optimalitás fogalmának alakulásáról az elmúlt évtizedekben. Optimalitás alatt rendszerint valamilyen számszerű minőségi jellemző minimumát szokták elméleti, matematikai eszközökkel meghatározni. Ezt a minimumot biztosító szabályozót hívjuk optimálisnak. A korábbi évtizedekben hihetelen mennyiségű elméleti munka folyt az ilyen optimumok kiszámítására, a szabályozók optimalizálására. A tanulási képességekhez hasonlóan végül is a gyakorlati igények alapvetően átalakították a „hasznos” optimalitás fogalmát. A gyakorlatban ugyanis többet ér az (x2opt,y2opt)=(4,2) optimum, lásd a 6. ábrát, ami nagyobb, mint az (x1opt,y1opt)=(2,1) optimum. A 2-es optimum környezetében viszont a görbe (több dimenzióban egy felület) lényegesen laposabb, érzéketlenebb: szaknyelven azt mondjuk, hogy robusztusabb. A gyakorlati feladatok egy igen kis százalékában fontos csak valamilyen minőségi jellemző valódi optimuma, ami sokszor jól láthatóan igen érzékeny, mert már igen kis változás hatására messze juthatunk az optimális minőségi jellemzőtől. Többre értékelődik egy rosszabb optimum, amely viszont igen széles tartományban tartható és nagymértékben érzéketlen a feltételek változására. Az optimalitás kritériumaként a modern irányításelmélet jelek és operátorok normafogalmait használja.
Az optimalitás átalakulása a sokváltozós összetett szabályozások struktúrájára is fennáll. A rendszerváltás hónapjaiban egy akadémiai előadáson megjegyeztem, hogy a rendszer- és irányításelmélet szerint az optimális irányítás a központi irányítás. Nagy csönd támadt, majd az ijedt szemekhez szólva megjegyeztem, hogy ez csak akkor igaz, ha valamennyi információ rendelkezésre áll a központban. Ez viszont gyakorlatilag soha nem fordul elő. Erről feledkeztek meg korábbi, nem sikerült politikai rendszerek irányítói (bár mindent megtettek, hogy a központban legyen az információ). Lehet, hogy elméletileg nem optimális, de sokkal megbízhatóbb, robusztusabb az elosztott irányítás, ahol a bizonyos célszerű centrumok közelében csomósodó információs központokra épül az irányítás. A centrumok között megfelelő koordinációra, együttműködésre van szükség. Ez a demokrácia!? Ugye milyen érdekes a társadalomtudományi hasonlatosság? Persze ne felejtsük el, hogy emberi, társadalmi rendszereink bonyolultsága lényegesen összetettebb, mint a technikai rendszereké, de az analógia szembetűnő. (A közönség fellélegzett!)
Következtetések
Az irányítási technológiák tehát rejtettek, a kényelemhez szokott felhasználók többsége nem is tud ezek működéséről. Ezért a rejtett jellegért a szakma sokszor panaszkodik, mert a szokásosnál több energiát igényel döntést hozók, kutatásialap-kezelők stb. meggyőzése a terület fontosságáról. Mélyebben gondolkodók kedvelik emlegetni a C3 vagy CCC esetleg a 3×C technológiákat, ahol a C-k jelentése angol elnevezéseken alapul; a Control (irányítás), Computation (számítás) és Communication (kommunikáció) szavak kezdőbetűit használják. Az adott terület szereti az első szóként a sajátját használni. Korszerű technikai rendszerek valóban igen sokszor e három rész adott magasszintű kombinációját realizálják, ezért rendkívül nehéz megmondani, hogy melyik oldal a bonyolultabb, a nehezebben megvalósítható, mert ez csak az adott feladatnál dől el. A számítógépes, digitális technika mindhárom területet átszövi, ezért sokszor hozzátesszük az I-t is, ami a programozott intelligenciát jelenti.
A
legkorszerűbb irányítási rendszerekben az
irányítás célját igen bonyolult
algoritmusok határozzák meg, és szó sincs
már a mért és előírt értékek
klasszikus összehasonlításáról. Egy
gépjárművet az úton tartó automatikától
elvárjuk, hogy szélsőséges időjárási
viszonyok között is felismerje az út nyomvonalát,
 és a vezető ideiglenes kiesése esetében is
biztonságos időre átvegye a kormányzást.
Az autópályán érzékelje a
forgalmi viszonyokat, és elöl-hátul biztonságos
távolságot tartva olyan forgalmi formációban
tartsa járművünket automatikusan, amely egyidejűleg
optimalizálja a fogyasztási, követési,
biztonsági és pályaelhagyási feltételeket
is.
és a vezető ideiglenes kiesése esetében is
biztonságos időre átvegye a kormányzást.
Az autópályán érzékelje a
forgalmi viszonyokat, és elöl-hátul biztonságos
távolságot tartva olyan forgalmi formációban
tartsa járművünket automatikusan, amely egyidejűleg
optimalizálja a fogyasztási, követési,
biztonsági és pályaelhagyási feltételeket
is.
Az irányítás és szabályozás technológiája továbbra is rejtve marad, sőt a módszerek fejlődésével egyre inkább észrevétlen lesz a felhasználó előtt. Ezt maguk az emberek igénylik: nem szeretnek belegondolni, hogy mi történhet, ha az automatika leáll. Ezért felelősségünk nagy, a jövő kényelme, biztonsága, lehetősége, élhető életünk minősége rajtunk is múlik. Hiába: „Controllare” necesse est.
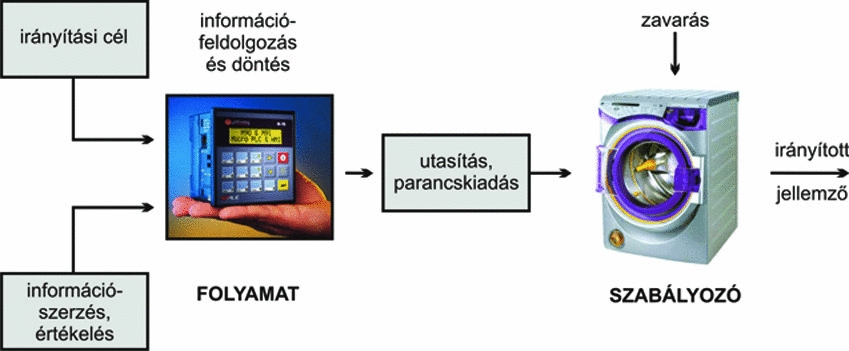
1. ábra • Az irányítási rendszer működési vázlata
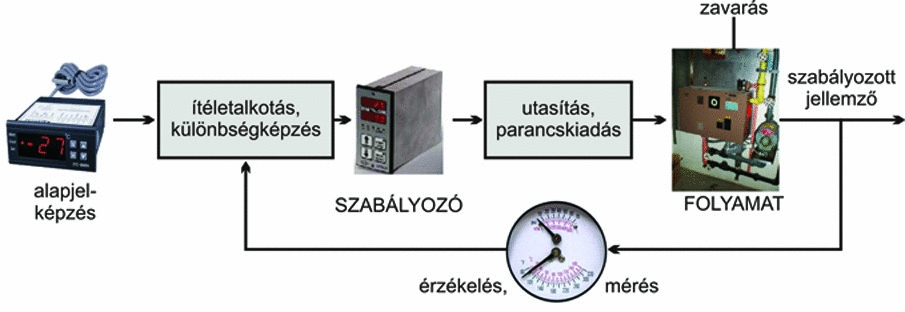 2.
ábra • A szabályozás működési
vázlata
2.
ábra • A szabályozás működési
vázlata
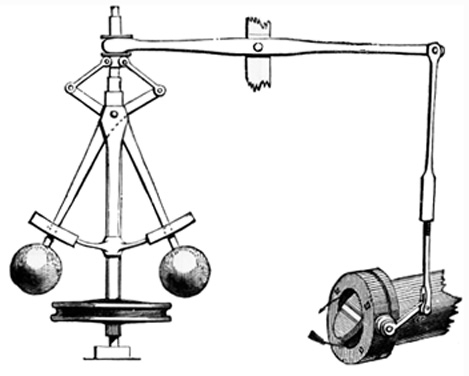 3.
ábra • Centrifugálszabályozó
3.
ábra • Centrifugálszabályozó
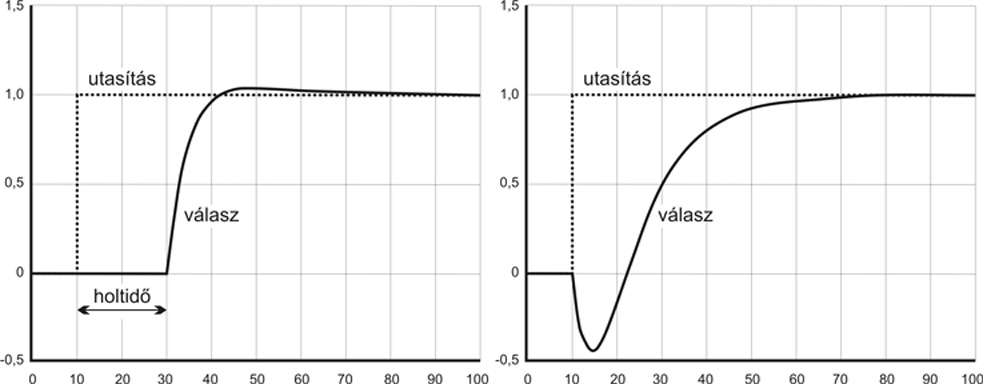 4.
és 5. ábra • Holtidős
folyamat és nem-minimumfázisú folyamat válasza
4.
és 5. ábra • Holtidős
folyamat és nem-minimumfázisú folyamat válasza
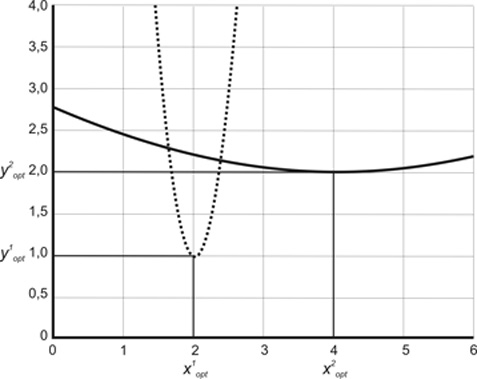
6. ábra • Különböző optimumok