|
|
Egyre inkább úgy tűnik, hogy a robotika kitör a
technikai elefántcsonttoronyból, és a szélesebb értelemben véve a
mindennapi tudomány részévé válik. A kutatók számára az igazi kihívást
az emberi képességek gépiesítése jelenti, a sokszor kimondatlan cél a
tökéletes emberrobot előállítása. Egyes jelek azonban arra utalnak,
hogy ez a kutatási irány sok szempontból hátrányos lehet, és végső
soron gátolhatja az „igazi” ember–robot kapcsolat létrejöttét. Az
evolúciós és ökológiai szempontokat is figyelembe vevő
viselkedéstudomány, az etológia, újszerű szemléletével talán segíthet
feloldani a várható feszültségeket.
Robotok körülöttünk
A történelmi perspektívákat kedvelők szerint a robotok története
egyidejű az újkori, pontosabban az ókori emberi kultúrával. Az első
„magától mozgó” szerkezetet sokan a görög tudós, Héron nevéhez kötik,
aki egy vízzel telt gömböt egy tengelyen rögzített a tűz fölé, amelyet
a gömbből kivezető és megfelelő ívben hajlított csöveken kiáramló gőz
forgatott körbe. A robotokra ma sincs általánosan elfogadott
meghatározás, de a legtöbbször mégis a Karel Čapek által bevezetett
szó eredeti jelentését veszik alapul. Általánosságban robotok alatt
olyan gépeket (mesterséges, ember által létrehozott műszaki szerkezet)
értenek, amelyek bizonyos feladat („munka”) önálló végrehajtására
képesek. Jelen pillanatban még nem is látszik célszerűnek egy
pontosabb meghatározás, annak ellenére, hogy ilyen módon például
számos háztartási gép is robotnak számít (lásd „konyhai robotok”).
Várható, hogy az elméleti és technológiai fejlődés majd kiérleli azt a
szempontrendszert, amelyek mentén a robotokat általánosan osztályozni
lehet.
Az elmúlt, 20. század mindenesetre lényeges
áttörést hozott a robotokra nézve, hiszen a gépészet és a
számítástechnika segítségével egy olyan eszközpark jött létre, amelyek
nélkül a mai tömegtársadalmak anyagi javakkal való ellátása szinte
elképzelhetetlen lenne (például autógyártás). Ezzel párhuzamosan az
emberrel kapcsolatot tartó, beszélgető, segítő vagy éppen helyette
háborúkban harcoló robotok inkább csak a tudományos-fantasztikus
irodalomban nyertek teret, sokszor olyan formában, mint idegen bolygók
küldöttei. A technikai fejlődés, különösen az informatika és
számítástechnika szédületes eredményei kezdetben csak az emberek
fantáziáját indították be, és ezt jól jelezi a 80-as majd 90-es
években a filmvásznon megjelenő robotok nagy száma.
Talán éppen a 21. század fordulója körül történt
meg az áttörés, hogy a robotok egyre nagyobb számban bukkantak fel a
kutató tudományos laboratóriumok környékén. Ezzel párhuzamosan egyre
többen jutottak és jutnak arra a következtetésre, hogy az emberiség
történetének következő nagy lépése a robotokkal való közös lét
kialakítása lesz. Máshogy megfogalmazva, sokak szerint a technikai
előrehaladás szinte elkerülhetetlen következménye egy olyan változás,
mely során a robotok „beépülnek” az emberi társadalomba. Ma még
nehezen érzékelhető ez a folyamat, de kétségtelenül tapasztalható,
hogy a robotok iránti érdeklődés felfokozott (vagy felfokozzák?), mind
egyéni, mind társadalmi szinten. A Föld számos pontján (Egyesült
Államok, Európa, Japán és Korea) folynak nagyon intenzív, államilag,
illetve közösségi szinten (például Európai Unió) támogatott kutatások,
és a napi hírekben, sőt egyes esetekben már az üzletek polcain is
találkozhatunk „valódi” robotokkal.
Ma már jól látszik, hogy ez az új kutatási irány
különböző tudományterületeknek ad munkát. Korábban az (ipari) robotok
esetében e készülékek tervezése, építése és működtetése döntően
mérnöki, konstruktőri feladat volt. Az utóbbi évek fejleménye, hogy a
sikeres fejlesztés reményében, illetve az ember–robot viszony
megértésének céljából a kutatásban legalább ilyen fontos szerepet
játszanak az eredendően az emberi létet és társadalmat értelmezni
hivatott tudományok, mint a pszichológia, szociológia, a filozófia
vagy az etika. Ugyanakkor a robotoktól egyre jobban „megkövetelt”
önállóság (autonómia), illetve az emberrel való szociális interakció
képessége megkerülhetetlenné tette azon tudományok szerepét, amelyek
hasonló képességeket az élő rendszerek esetében vizsgálnak.
Természetesnek tűnhet, hogy egy látóképességgel rendelkező robot
esetében hasznos, ha az állatok (vagy az ember) látásával kapcsolatos
biológiai ismeretekre is támaszkodhatunk. Hasonlóképpen egy
„gondolkodó” robot építéséhez jó szolgálatot tehet más, élő rendszerek
elmeműködésének ismerete, így könnyen belátható a modern kognitív
pszichológia és robotika egymást jól kiegészítő együttműködésének
szükségessége.
Meglepő azonban, hogy mindezzel szemben milyen
kevéssé kutatott a robotok viselkedése, illetve az emberrel való
viselkedési interakció lehetősége és problémája. Az általában intenzív
robotikai kutatások ellenére mindeddig elég sporadikusnak tekinthetők
olyan közös kutatások, amelyek viselkedésbiológusok (etológusok) és
robottervező szakemberek együtt végeznek. Az alábbiakban az ilyen
együttműködések perspektíváit tekintjük át röviden.
Érdekesek, de nem szeretjük őket!
Míg a kutatók kis közösségei nagyon lelkesek egy-egy új robot
kifejlesztésekor, gyakran azzal kell szembesülniük, hogy a fémlényt az
emberek többsége elutasítja. Kezdetben mindenki mutat valamilyen
érdeklődést (például média), de idővel mindez elmúlik, az emberek nem
igazán lelik kedvüket a robotokkal való interakcióban. Bár a
kezdetekhez képest a helyzet talán némileg javult, részben annak
köszönhetően, hogy a robotok egyre összetettebb képességekkel
rendelkeznek, az áttörés elmaradt. Az utóbbi években számos kutatás
éppen a robotok „sikerének” elmaradását elemzi az okokat keresve.
A kutatókban sokáig
nem tudatosult, hogy a robotok minőségileg más terepre tévednek, ha a
gyárak területét „elhagyva”, az ember közösségi tereibe, lakásaiba
kerülnek. Ezeket a robotokat (talán részben a filmélmények hatására
is) már nem a hagyományos értelemben vett gépeknek tekinti az ember,
hanem lényeknek, amelyekkel szociális interakcióba lép a biológiai
evolúció, illetve a kulturális tapasztalatok során szerzett
viselkedéskészlete alapján. Ilyen helyzetben a mai robotok kudarca
megjósolható. A probléma azonban szerteágazó, egyik legkorábbi
megfogalmazása mindmáig sok vitát gerjeszt.
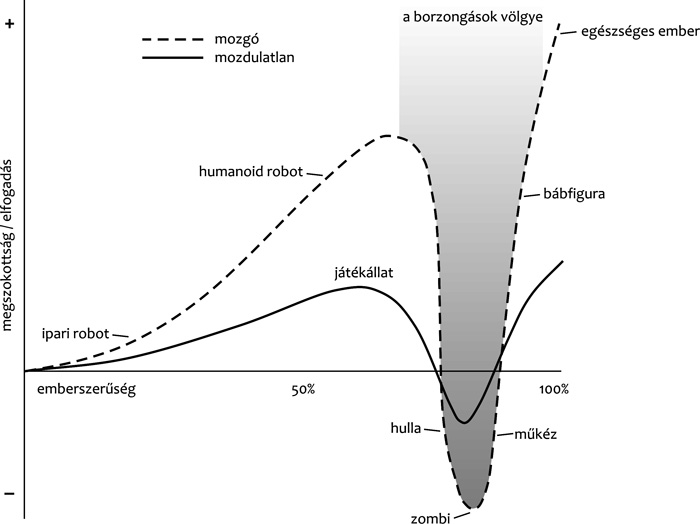
A japán Mori Maszaro (Masaro Mori) szerint
viselkedésünket alapvetően befolyásolja, hogy a robot mennyire
hasonlít ránk. A viszonylag kevéssé hasonlító robotokat inkább
elfogadjuk, a már „szinte emberszerű” robotok azonban inkább
gyanakvást, elkerülést, viszolygást vagy éppen félelmet váltanak ki
(1. ábra). Bár
a jelenségre vannak kísérleti adatok (Walters et al., 2008),
humánetológiai szempontból is értelmezhető, hisz az ember (és szinte
minden állatfaj) egyik alapvető veleszületett tulajdonsága, hogy
hatékonyan képes azonosítani a csoportjának tagjait, illetve azokat,
akiket befogad a csoportba. Az „idegen” illetve a „különc” (a faj vagy
a csoport egyedeitől eltérő sajátságokkal rendelkezők) iránti
ellenséges viselkedés tetten érhető embergyermekek esetében, de
általában is megfigyelhető szociális állatoknál (Csányi, 1999). Ez az
egyszerű példa is jól láttatja, hogy milyen problémákat vet, illetve
vethet fel a robotok megjelenése az emberi közösségekben, ami jóval
túlmutat a robot, mint gép megalkotásának problémáján. Mivel az egész
témakör valójában csak a jövőben válik vagy válhat társadalmi üggyé, a
kutatás „jelenség hiányában” igencsak nehézkes. Az egyetlen
használható megközelítési módnak az tűnik, ha az elképzelésünknek
legalább bizonyos szempontból megfelelő egyszerűbb jelenséget keresünk
vizsgálataink céljából. Úgy néz ki, hogy az ember története valóban
kínál legalább egy ilyen példát.
Egy több mint húszezer éves „biorobot”
A természet vagy éppen a háziállatok iránt érdeklődő robotkutatóknak
már régóta feltűnhetett volna, hogy valójában messze nem Héron gőzgépe
volt az első „robot”. Ehhez persze meg kell engednünk, hogy egy robot
szerves anyagból is felépülhessen, de ez nem érinti a lényegi, a
funkcióbeli elvárást, hogy képes legyen (részben) önálló
munkavégzésre. Az ember ugyanis már a mai értelemben vett gépek
megjelenése előtt felismerhette, hogy miképp lehet az ő szempontjából
mesterséges „eszközöket” felhasználni munkájának megkönnyítésére.
Igaz, mai ismereteink szerint a kutya megjelenése nem kapcsolódik
közvetlenül az ember által végzett tevékenységekhez, azaz az első
kutyák feltehetően nem „munkakutyák” voltak, mégis, idővel a speciális
feladatokra történő szelekció olyan kutyatípusokat hozott létre,
amelyek lényeges mértékben megkönnyítettek bizonyos feladatokat
(például nagy nyájak terelése és védelme). Röviden, a kutyák
megjelenése, különböző feladatokra történő szelekciója, majd a velük
való közös munka, kulcsmozzanataiban megfeleltethető a robotokkal
történő emberi interakciónak. E tekintetben a kutyákat biorobotoknak
tekinthetjük. Fontos azonban már e helyütt kiemelni, hogy ez a
felismerés semmilyen mértékben nem szabad, hogy érintse a kutya–ember
viszonyt és annak jelenlegi vagy jövőbeli jellegét, habár a kutató
szempontjából számos fontos felismerést tesz lehetővé.
A kutya–ember kapcsolat már első ránézésre is sok
megfontolandó jellegzetességgel rendelkezik. Alapvetően társak közötti
szoros szociális kapcsolatról van szó, amely azonban a közös célok és
lehetőségek tekintetében aszimmetrikus. A sikeresség fontos eleme
lehet, hogy két lényegesen különböző faj között jött létre, amelyek
számos funkció tekintetében kiegészítik egymást. A háziasítás
sikerességéhez feltehetően hozzájárult, hogy a kutya olyan
képességeket szerzett, amelyek az egyedfejlődés során kibontakozva
segítik az emberi közösségekbe való beilleszkedést (Topál et al.,
2009). Ezek a viselkedésformák a szociális kapcsolatok széles körét
érintik, beleértve a kötődést, kommunikációt, szociális tanulást és
együttműködést. A sikeres szociális interakció csak úgy jöhet létre,
ha a partnerek kölcsönösen felismerik egymás viselkedését, a hozzá
kapcsolódó kommunikációs jeleket, és képesek az akció közös céljának
megfelelően alkalmazkodni lépésről lépésre (Miklósi, 2007).
Mi, vagy talán ki a társrobot?
A „biorobotokra” vonatkozó felismeréstől függetlenül a robotika is
felismerte az ún. szociális, vagy más szóval társrobotokban rejlő
lehetőséget (Fong et al., 2003). A társrobotok építése nyilvánvalóan
hatalmas kihívást jelent, hiszen képesnek kell lenniük az emberrel
való interakcióra, ugyanakkor a hasznosság igénye is könnyen sugallt
olyan víziókat, hogy e robotok jó szolgálatokat tehetnek magányosan
élő idősek otthonaiban, kórházakban vagy éppen óvodákban.
Valójában nem tudhatjuk, hogy a jövőben milyen
élethelyzetekben kapnak szerepet a robotok, és így a konkrét
körülmények megnevezése sokszor csak a kutatót támogató szervezet
számára igazolja a kutatás gyakorlati jelentőségét. A mi
|
|
|
szempontunkból most sokkal fontosabb és ugyanakkor
kevésbé kutatott probléma magának a társrobotnak a jellege. Időről
időre ugyan vitáznak arról, hogy milyen kognitív és viselkedési
képességekkel szükséges felruházni egy ilyen robotot, valójában a
problémák sokszor inkább gyakorlati jellegűek, és a technikai fejlődés
mindenkori állapotát tükrözik. A trend teljesen egyértelmű: a cél az
emberszerű, sőt emberszerű, de az embert adott esetben túlszárnyaló
robot. Ez a „csúcsra törekvés” az emberi pszichológia szempontjából
teljesen érthető, azonban be kell látnunk, hogy tudományos értelemben
nem triviális. Egyáltalán nem biztos, hogy a robotika célja a
„tökéletes” ember előállítása kell, hogy legyen (vagy még ennél is
több), ráadásul úgy, hogy csupa „tökéletlen” ember áll rendelkezésre,
akik modellül szolgálhatnak. Éppen ezért meglepő, hogy ezt a kérdést
sem biológiai, sem pszichológiai, vagy akár filozófiai oldalról nem
elemezték eddig kellő kritikával.
Éppen ellenkezőleg, a fenti kutyapélda is azt
mutatja, hogy hatékony együttműködés nemcsak másik emberrel, hanem más
élőlénnyel is kialakítható megfelelő körülmények teljesülése esetén.
Mindezek alapján a kérdés általánosan is megfogalmazható: milyen
tulajdonságokkal és képességekkel kell rendelkeznie egy (nem ember)
robotnak, amely sikeres lehet az emberek közösségében? Ugyanúgy, mint
a kutya esetében, itt sem kell feltétlenül egy adott, „legjobb”
megjelenési alakban vagy formában gondolkodni, és várható, hogyha ez
az elképzelés valóra válik, számtalan különféle újszerű robot jön
létre. Ráadásul a mai robotkészítés abban is eltér a korábbi
helyzettől, hogy nem vagyunk megkötve az „alapanyag” jellegét
illetően. A kutyák evolúciós múltja csak bizonyos mértékű változtatást
tett lehetővé, amely egyben korlátozta is a felhasználhatóságot.
Ráadásul a kutyák háziasítása során az embereket valószínűleg
korlátozták akkori képességeik és lehetőségeik, és bár számos állat
esetében igyekeztek szorosabbra vonni a szociális köteléket, végül is
csak néhány fajjal alakult ki szociális kapcsolat és hatékony
együttműködés, és ezek közül is kiemelkedik a kutya.
Egyelőre beláthatatlan következményekkel járna, ha
elvethetnénk a jelenlegi embert utánzó robotokra vonatkozó
elképzelést, vagy legalább sikerülne megszüntetni e megközelítés
kizárólagosságát. Talán éppen ez tenné lehetővé, hogy robbanásszerűen
megnőjön a robotika szabadságfoka, hiszen sem morfológiai értelemben,
sem a viselkedés szempontjából nem kellene követni (pontosan másolni)
a valóságban igen bonyolult és kevéssé ismert emberi sajátosságokat. A
biológiai evolúció számtalan szociális rendszert hozott létre
különböző fajok formájában, és ezeket a tapasztalatokat is fel lehetne
használni a robotépítésben. Valójában minden olyan szociális képesség,
amelyet az ember más fajokban értelmezni képes, beépíthető lenne
ezekbe a robotokba, így olyan fémlények jöhetnek létre, amelyekre a
biológiai evolúcióban nem találunk példát. Az egyetlen fontos
kritérium a robot oldaláról, amely a kutya esetében is jelentkezik,
hogy kellő affinitással rendelkezzen az emberi közösségekbe való
belépésre.
Egy etológiai megközelítés lehetőségei
A fentiek alapján definiálhatónak tűnik egy új interdiszciplináris
alkalmazott tudomány, az etorobotika, amely az vizsgálja, hogy miképp
lehet etológiai elvek mentén „új típusú” robotokat építeni. Az
etorobotika célja olyan hard- és szoftverek kifejlesztése, amelyek
olyan elvileg új funkciót betölteni képes autonóm robotok működését
irányítják, amelyek képesek más élő (vagy hasonló robot) egyedekkel
közös csoportban élni, szociális interakciókban részt venni.
Az etorobotika tudományát művelő ún. „etológus
mérnök” éppen úgy gondolkozik, mint az orvosgenetikus mérnök. Míg a
molekuláris biológus természetes genetikai folyamatokat alkalmaz új
gyógyító megoldások kifejlesztéséhez (pl. génterápia), az etológus
mérnök azt vizsgálja, miképp lehet a viselkedéssel és annak
szabályozásával kapcsolatos ismereteket innovatív módon új problémák
megoldására ötvözni. A fenti meghatározás különösen fontos kitétele az
„új funkció”, hisz ez garantálja, hogy az új lény ne egy meglévő „faj”
egyszerű másolata legyen. A robot és az ember közötti együttműködés
lényege nem az lenne, hogy az eddigi emberi funkciókat robotok váltsák
ki, hanem, hogy a robot és vele együttműködésben az ember új
feladatokat legyen képes megoldani. Szemléletes példa a kutyák
bevonása a pásztorkodásba, amely esetben a terelőkutyák teljesen új
funkciót látnak el a munkájuk során. Az új funkció, azaz a túlélés egy
új lehetőségének megtalálása képezi minden új faj keletkezésének
alapját is. Az ember–robot kapcsolat esetében az eltérő funkciók
kizárnák a fajon belüli versengés lehetőségét, ugyanakkor a beépített
ember iránti preferenciarendszer az együttműködés alapját jelentheti.
Az etológiai megközelítés számos praktikus
szempontból is előnyös lehet. A kellő tudományos ismeretek, illetve
kritikai hozzáállás nélkül a robotok bevezetése a társadalomba nem
várt problémákat okozhat. Egyesek már most is komolyan felvetették,
hogy a szociális robotok hasznosak lehetnek az óvodai vagy iskolai
nevelésben (Sharkey, N. – Sharkey, A., 2009). Sőt, az Amerikai Nemzeti
Tudományos Akadémia egyik legjelentősebb lapjában nemrég közöltek egy
tanulmányt, amelyben kétéves gyerekek csoportjába helyeztek el egy
emberszerű robotot öt hónapra. A megfigyelések szerint a kezdeti
tartózkodás után a gyerekek meglepően könnyen fogadták be az idegent a
közösségükbe, és a kutatók szerint az ötödik hónapra már nem volt
különbség a gyerekek egymás közötti, illetve a robot irányában
mutatott interakciói között (Tanaka et al., 2005). Természetszerűleg a
kutatók az eredményeket egyfajta sikerként élték meg, ugyanakkor a
jelenség számos problémát vett fel pszichológiai és etikai szempontból
egyaránt.
Könnyen belátható, hogy egy etológiai megközelítés
megóv ezektől a problémáktól, hiszen itt nem merül fel, hogy a robot
épp tökéletlen emberszerűségével vagy éppen túl tökéletes
hasonlóságával okozhat komoly pszichológiai problémákat a gyerekeknek,
akiknek éppen fejlődésük korai szakaszában van szükségük a legjobban
arra, hogy megismerkedjenek a felnőttek „emberi” világával. Régóta
ismert viszont, hogy a kutyák jelenléte a családban segíti a gyerekek
szocializációját, beleérve a kooperációs és kommunikációs képességek
kifejlődését. Sokan épp ilyen megfigyelésekre alapozva javasolják,
hogy a különösen városi óvodás gyerekek esetében lenne fontos az
állatokkal való rendszeres interakció, és ezzel összefüggésben
terjednek el egyre jobban az ún. állatterápiás eljárások (Topál,
2004). Ezek alapján az embert utánozó robotokkal ellentétben, az
etológiai elvek alapján tervezett robotok pszichológiai és etikai
értelemben is társai lehetnének a gyermekeknek, anélkül, hogy
veszélyeztetnék a felnőttekkel (az emberrel) való szociális
kapcsolatok kialakulását.
Modern etorobotika idehaza: jelen és jövő
Az elmúlt évek azt mutatták, hogy a robotika hihetetlen fejlődés előtt
áll. Ha ehhez hozzáadjuk az informatika és a biológia előrehaladását
is, szinte jósolhatatlanná válik a jövő. Jól kitapinthatóak azonban a
hiányosságok is, elsősorban az elmélet gyengesége, illetve a technikai
fejlődéstől jóval lemaradó olyan kutatások, amelyek a számítógépek,
illetve a robotok és az ember közötti interakciót és ennek társadalmi
hatásait vizsgálnák. Ezeket a folyamatokat az Európai Unió is
felismerte, és kutatási támogatásai révén párhuzamosan igyekszik
támogatni az elsősorban műszaki irányultságú robotikai kutatásokat
éppúgy, mint a robotok és a társadalom kapcsolatát vizsgáló
tudományterületeket. Fontos lenne, hogy a hazai kutatók közössége is
minél előbb, és minél intenzívebben vegye ki a részét ezekből a
lehetőségekből. A 7. keretprogram által támogatott kutatásokban az
ELTE Etológia Tanszéke sikeresen működik közre a „Living with robots
and interactive companions” (LIREC) konzorciumban, amelynek egyik fő
feladata etológiai megalapozottságú robotok tervezése. Különösen
örvendetes, hogy a Társadalmi Megújulás Operatív Program (TÁMOP)
keretében az Etológia Tanszék, a Budapesti Műszaki és
Gazdaságtudományi Egyetem (BME) Távközlési és Médiainformatikai
Tanszéke, illetve a Magyar Tudományos Akadémia Számítástechnikai és
Automatizálási Kutatóintézet (SZTAKI) közösen kapott lehetőséget arra,
hogy a robotfejlesztés eme irányába a magyar kutatók is aktívan
bekapcsolódhassanak. Kutatáspolitikai és iparfejlesztési szempontból
is több mint megfontolandó, hogy a magyar tudomány a robotika
kialakulásának megfelelő súllyal képviseltesse magát ezen a területen
a nemzetközi mércével mérve is elismert számítástechnikai,
informatikai és etológiai kutatásainkra alapozva.
A szerző kutatásait az Európai Unió FP7-es programja
(ICT-2007-LIREC-215554) és a TÁMOP (4.2.2/08/1/KMR) keretében elnyert
pályázat támogatja. Köszönettel tartozom Korondi Péternek (BME),
Baranyi Péternek (BME) és másoknak a leírt gondolatok megvitatásáért.
Kulcsszavak: robotika, etológia, szociális viselkedés, kutya, társ,
ember-robot interakció
IRODALOM
Csányi Vilmos (1999): Az emberi természet.
Humánetológia. Vince, Budapest
Fong, Terrence – Nourbakhsh, I. R. –
Dautenhahn K. (2003): A Survey of Socially Interactive Robots.
Robotics and Autonomous Systems. 42, 143–166.
Miklósi Ádám (2007): Dog Behaviour,
Evolution and Cognition. Oxford University Press
Sharkey, Noel – Sharkey, Amanda (in print)
The Crying Shame of Robot Nannies: An Ethical Appraisal. Journal of
Interactive Studies.
WEBCÍM >
Tanaka, Fumihide – Cicourel, A. –
Movellan, J. R. (2007): Socialization between Toddlers and Robots at
an Early Childhood Education Center. Proceedings of the National
Academy of Sciences of the USA. 104, 17954–17958.
WEBCÍM >
Topál József (2004): A humánetológia és a
gyógypedagógia kapcsolata. In: Zászkaliczky Péter – Verdes Tamás
(szerk.): Tágabb értelemben vett gyógypedagógia. A fogyatékosság
jelensége a gyógypedagógia határtudományaiban. ELTE BGGYFK–Kölcsey
Ferenc Protestáns Szakkollégium, Budapest, 155–185.
Topál József – Miklósi Á. – Gácsi M. –
Dóka A. – Pongrácz P. – Kubinyi E. – Virányi Zs. – Csányi V. (2009):
The Dog As a Model for Understanding Human Social Behavior. Advances
in the Study of Animal Behaviour. 39, 71–116.
Walters, Michael L. – Syrdal, D. S. –
Dautenhahn, K. – Te Boekhorst, R. – Koay, K. L. (2004): Avoiding the
Uncanny Valley: Robot Appearance, Personality and Consistency of
Behavior in an Attention-Seeking Home Scenario for a Robot Companion.
Autonomous Robots. 24, 159–178.
|
|